- Overview
- Plan Files and Patch Files
- User Interface
- Plan Objects
- Traffic Demand Modeling
- Simulation
- Simulation Analysis
- Forecasting Traffic
- IGP Simulation
- MPLS Simulation
- RSVP-TE Simulation
- Segment Routing Simulation
- Layer 1 Simulation
- Quality of Service Simulation
- BGP Simulation
- Advanced Routing with External Endpoints
- VPN Simulation
- Multicast Simulation
- Metric Optimization
- RSVP-TE LSP Optimization
- LSP Optimization
- SR-TE Optimization
- SR-TE Bandwidth Optimization
- LSP Disjoint Path Optimization
- LSP Setup Bandwidth Optimization
- LSP Loadshare Optimization
- Capacity Planning Optimization
- Changeover
- Patch Files
- Reports
- Cost Modeling
- Plot Legend for Design Layouts
Cisco WAE Design 6.4 User Guide
Bias-Free Language
The documentation set for this product strives to use bias-free language. For the purposes of this documentation set, bias-free is defined as language that does not imply discrimination based on age, disability, gender, racial identity, ethnic identity, sexual orientation, socioeconomic status, and intersectionality. Exceptions may be present in the documentation due to language that is hardcoded in the user interfaces of the product software, language used based on RFP documentation, or language that is used by a referenced third-party product. Learn more about how Cisco is using Inclusive Language.
- Updated:
- June 29, 2016
Chapter: LSP Disjoint Path Optimization
LSP Disjoint Path Optimization
LSPs and LSP paths are disjoint if they do not route over common objects, such as interfaces, nodes, or L1 links. The LSP Disjoint Path Optimization tool creates disjoint LSP paths for RSVP LSPs and SR LSPs and optimizes these paths based on user-specified constraints.
One common use case for this optimization is that disjoint LSPs can ensure services are highly resilient when network failures occur. For example, this tool enables you to route LSPs to have disjoint primary and secondary paths that are optimized to use the lowest delay metric possible.
If it is not possible to achieve the optimization as defined by the routing selection, path requirements and constraints, the tool provides the best disjoint paths and optimization possible.
Upon completion, WAE Design tags the LSPs with DSJOpt and generates a new plan file named with an -DSJopt suffix. WAE Design also writes a report containing the results of the optimization.

Note![]() While this optimizer is applicable to both RSVP LSPs and SR LSPs, only one of these types of LSPs can be optimized at a time.
While this optimizer is applicable to both RSVP LSPs and SR LSPs, only one of these types of LSPs can be optimized at a time.
Disjoint Routing Selection
Only existing LSP paths are rerouted. New LSP paths are not created.
- Explicit hops are modified or created for RSVP LSPs.
- Segment list hops are modified or created for SR LSPs. The final hop is either a node hop or interface whose remote node is the destination of the LSP.
Segment lists are created only for LSP paths, and only LSP path segment lists are updated. If a segment lists is associated with an LSP (rather than an LSP path), that LSP segment list is removed.
Routing options include the following.
- Create disjoint primary and secondary paths for LSPs—For all LSPs, whether they are in a disjoint group or not, route all LSP paths so that they are disjoint from all other paths belonging to that LSP. This disjointness extends beyond primary and secondary paths to include all other path options (for example, tertiary).
- Create disjoint paths between LSPs in disjoint groups—For all LSPs that are in disjoint groups, route all LSP paths so that they are disjoint from all other paths belonging to LSPs in that disjoint group. This disjointness extends beyond primary and secondary paths to include all other path options (for example, tertiary).
Example: All LSPs in disjoint group East are rerouted to be disjoint from each other. All LSPs in disjoint group Southeast are rerouted to be disjoint from each other. However, LSP paths in the East group are not rerouted to be disjoint from those in the Southeast group.
- Create disjoint primary paths for LSPs in disjoint groups—For all LSPs that are in disjoint groups, reroute only their primary paths so that they are disjoint from each other.

Disjoint Path Requirements
The disjoint path requirements identify the priority for creating disjointness across a path. Disjointness priorities 1, 2, 3, and Ignore are available for circuits, SRLGs, nodes, sites, and L1 links. The tool attempts to create disjointness for all objects that have a priority set other than Ignore. If full disjointness cannot be achieved, then the tool prioritizes disjointness based on these values.
Example: Circuits have a priority of 1, SRLGs have a priority of 2, and the other objects are ignored. If the tool cannot achieve full disjointness across both circuits and SRLGs, it will prioritize the disjointness of circuits over SRLGs.
Example
This example shows how disjoint routes can be created for primary and secondary RSVP LSP paths, and how those routes differ, depending on the path requirements set.
The LSP has a primary and secondary LSP paths that use the same route from cr2.sjc to cr2.wdc. The LSP is not a member of a disjoint group.

In both Figure 24-1 and Figure 24-2, the option is selected to create disjoint primary and secondary paths for LSPs. However, they show different secondary path routes.
- Figure 24-1 shows explicit interface hops set for the secondary LSP path that force it to take a different (northern) route from cr2.sjc to cr2.wdc. Since the disjoint path requirement is only circuits, the primary and secondary paths route across different circuits, as indicated in the resulting report. However, they share a common L1 link between slc and kcy.
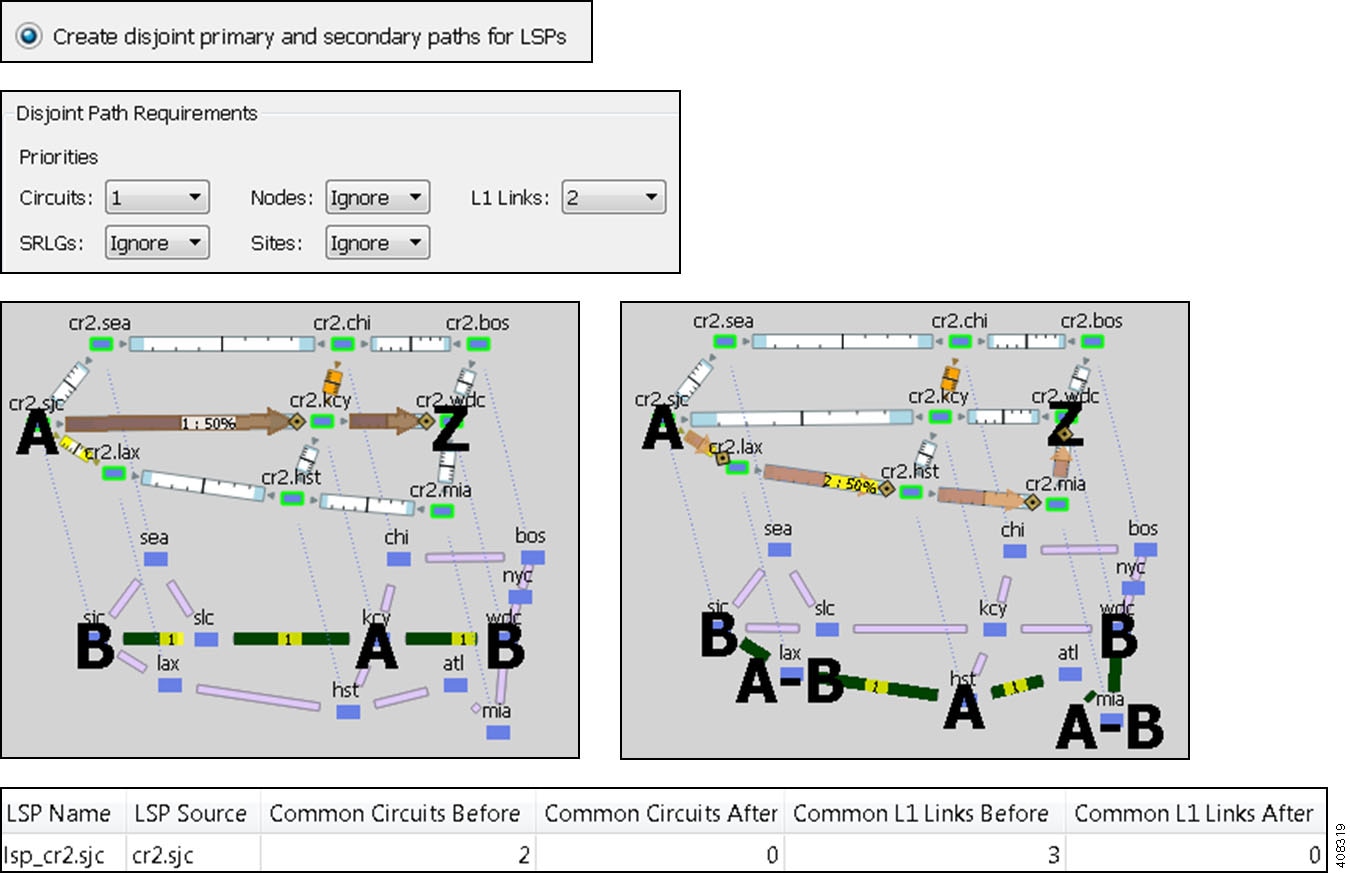
- Figure 24-2 is based on setting circuits as the first priority for disjoint requirement and L1 links as the second priority. The result is a different set of explicit hops for the secondary LSP path, routing it through southern disjoint circuits that are mapped to different L1 links. The resulting report shows there are no longer any common L1 links.
Figure 24-1 Primary and Secondary Paths Based on Disjoint Circuit Requirements
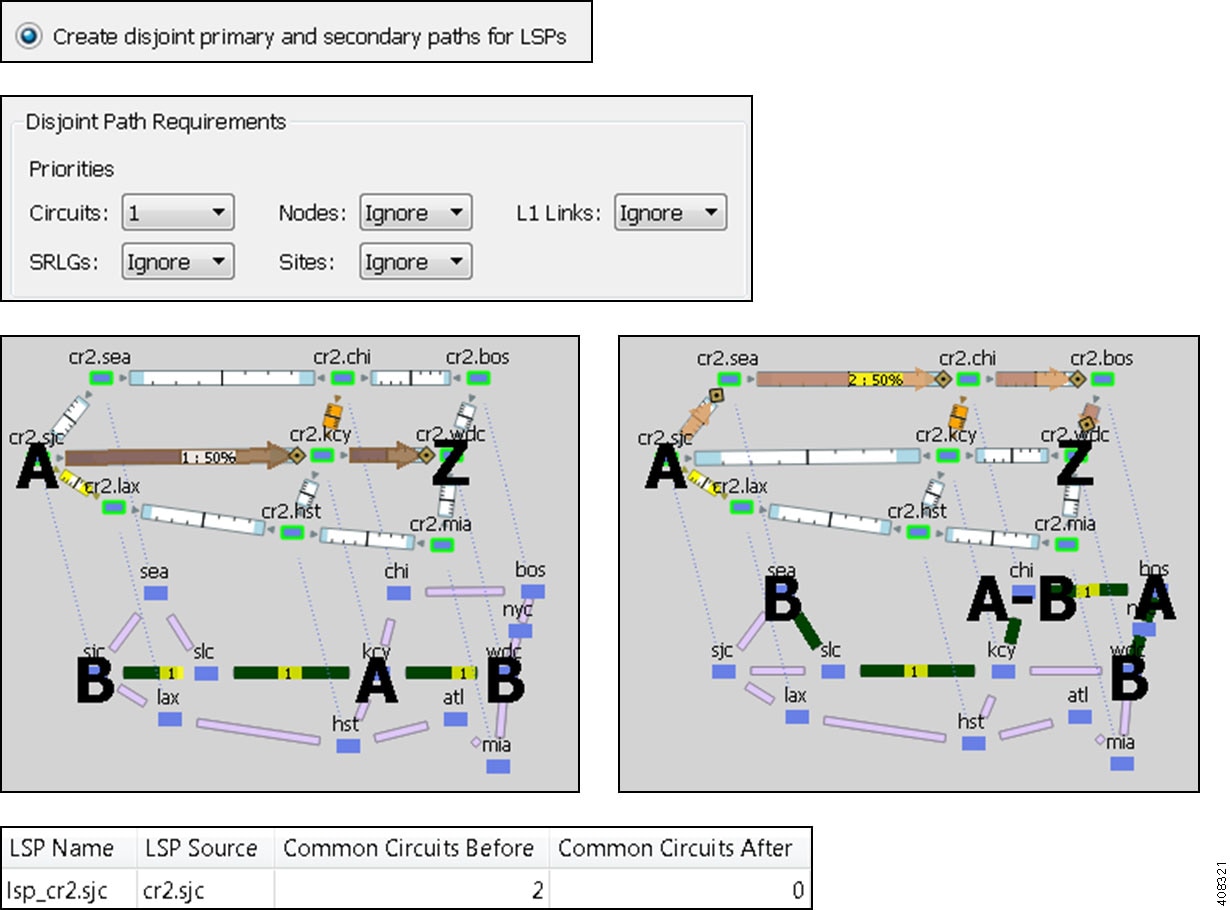
Figure 24-2 Primary and Secondary Paths Based on Disjoint Circuit and L1 Link Requirements
Constraints
- Minimize path metric—Paths are optimized to minimize the sum of the metrics along the path with respect to delay, TE, or IGP metrics. All of these properties are configurable from an interface Properties dialog box, and delays can also be set in a circuit Properties dialog box.
- Fix LSP Paths—Selected or tagged LSP paths are not rerouted. This constraint is useful, for example, when you have previously optimized specific LSPs within the network and want to maintain their routes.
- Only update LSPs that violate requirements—Paths are modified only if they violate the requirements specified in the Disjoint Path Requirements section of the dialog box.

Example
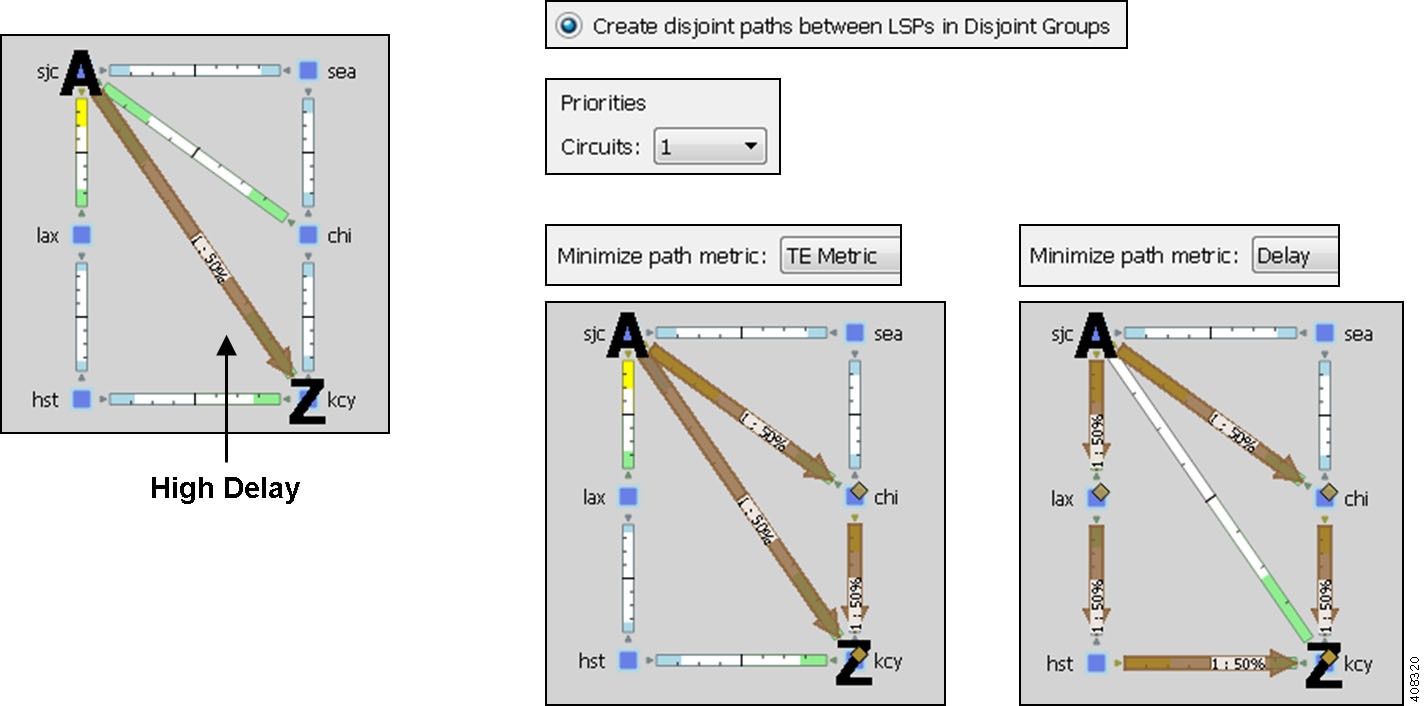
This example shows how disjoint routes can be optimized for two SR LSPs using the same source (sjc) and destination (kcy).
- Both LSPs belong to the same disjoint group, and both LSPs have an LSP path.
- The circuit between sjc and kcy has significantly higher delay than the other circuits.
- The only disjoint path requirement selected is circuits.
- Figure 24-3 demonstrates the following.
–![]() Before using the LSP Disjoint Path Optimization tool, both LSP paths use the same route. There are no segment list hops.
Before using the LSP Disjoint Path Optimization tool, both LSP paths use the same route. There are no segment list hops.
–![]() By selecting the option to create disjoint paths between LSPs in the same disjoint group and using the TE metric for the shortest path calculation, two disjoint LSP path routes are created. Both have a segment list node hop on the destination node. One has an additional segment list node hop on chi to force a different route.
By selecting the option to create disjoint paths between LSPs in the same disjoint group and using the TE metric for the shortest path calculation, two disjoint LSP path routes are created. Both have a segment list node hop on the destination node. One has an additional segment list node hop on chi to force a different route.
–![]() By selecting the same disjoint option and using the Delay metric for the shortest path calculation, one LSP is moved away from the high-delay sjc-kcy circuit since traversing that circuit is not the shortest latency path.
By selecting the same disjoint option and using the Delay metric for the shortest path calculation, one LSP is moved away from the high-delay sjc-kcy circuit since traversing that circuit is not the shortest latency path.
Figure 24-3 Example Routing of SR LSPs
Disjoint Report
The resulting report summarizes the number of LSPs and number of updated LSP paths. Depending on the disjoint option selected, the report summarizes the uniquely distinguishing attributes, such as LSP name and disjoint group name.
The Disjoint Groups, LSP Disjointness, and Path Disjointness sections all list the number of common objects (selected as disjoint path requirements) both before and after the optimization, as well as disjointness violations based on these requirements both before and after the optimization. You can filter to related information from these sections.
To access this information later, select the Window->Reports menu.
Pre-Requisites
- The plan file must already contain the primary LSP paths. If using the option to create disjoint primary and secondary paths, then it must also at least contain secondary LSP paths, though it can contain other path options, such as tertiary. For information on creating LSP paths, see the MPLS Simulation chapter.
- If creating disjoint paths between LSPs in the same disjoint group, the LSPs must first be added to the disjoint groups.
Create Disjoint Groups
Step 1![]() Select one or more LSPs, right-click, and select Properties from the context menu.
Select one or more LSPs, right-click, and select Properties from the context menu.
Step 2![]() Click the Advanced tab.
Click the Advanced tab.
Step 3![]() Enter or select the disjoint group name.
Enter or select the disjoint group name.
Step 4![]() If needed, assign priorities to LSPs within these groups. Higher priority LSPs are assigned shorter routes based on the selected metric. The higher the number, the lower the priority.
If needed, assign priorities to LSPs within these groups. Higher priority LSPs are assigned shorter routes based on the selected metric. The higher the number, the lower the priority.
Example: There are two LSPs in the same disjoint group, each with a different disjoint priority. Run the LSP Disjoint Path Optimization tool to create disjoint paths for LSPs in the same disjoint group using TE metrics as a constraint. The LSP with a disjoint priority of 1 routes using the lowest TE metric, and the LSP with a disjoint priority of 2 routes using the second lowest TE metric.

Optimize Disjoint Paths
Step 1![]() Skip this step if using tags. You can also skip this step if you want to run the tool on all SR LSPs and there are only SR LSP types, and if you are not selecting LSP paths to fix.
Skip this step if using tags. You can also skip this step if you want to run the tool on all SR LSPs and there are only SR LSP types, and if you are not selecting LSP paths to fix.
If you are fixing selected LSP paths and/or if you are running the optimization on selected SR LSPs, select them before opening the dialog box.
Tip! If the table contains both RSVP and SR LSPs, show the Type column to easily sort and find the type of LSP needed.
Step 2![]() Select the Tools->LSP Disjoint Path Optimization menu.
Select the Tools->LSP Disjoint Path Optimization menu.
Step 3![]() Select whether to optimize disjoint paths for all LSPs, selected LSPs, or tagged LSPs.
Select whether to optimize disjoint paths for all LSPs, selected LSPs, or tagged LSPs.
Step 4![]() Select how to route the disjoint paths. See the Disjoint Routing Selection section.
Select how to route the disjoint paths. See the Disjoint Routing Selection section.
Step 5![]() Select disjoint path requirements and priorities. See the Disjoint Path Requirements section.
Select disjoint path requirements and priorities. See the Disjoint Path Requirements section.
Step 6![]() Select the constraints. See the Constraints section.
Select the constraints. See the Constraints section.
Step 7![]() Specify whether to create and add tags to all SR LSPs rerouted during optimization. You can edit the DSJOpt default.
Specify whether to create and add tags to all SR LSPs rerouted during optimization. You can edit the DSJOpt default.
Step 8![]() Specify whether to create a new plan with the results of the optimization. Unless a name is specified, WAE Design attaches an -DSJopt suffix to the current plan file name. If not selected, WAE Design changes the current plan file with the updated information.
Specify whether to create a new plan with the results of the optimization. Unless a name is specified, WAE Design attaches an -DSJopt suffix to the current plan file name. If not selected, WAE Design changes the current plan file with the updated information.
Related Topics
- MPLS Simulation chapter
- RSVP-TE Simulation chapter
- Segment Routing Simulation chapter
- Traffic Demand Modeling chapter
- RSVP-TE Optimization chapter
- Explicit and Tactical RSVP-TE LSP Optimization chapter
- SR-TE Optimization chapter
- SR-TE Bandwidth Optimization chapter
- LSP Loadshare Optimization chapter
 Feedback
Feedback