トポロジの設計の概要
設計フェーズは、ネットワーク トポロジ作成のための最初のステップです。設計フェーズでは、以下のセクションで説明されているタスクを実行します。
この製品のマニュアルセットは、偏向のない言語を使用するように配慮されています。このマニュアルセットでの偏向のない言語とは、年齢、障害、性別、人種的アイデンティティ、民族的アイデンティティ、性的指向、社会経済的地位、およびインターセクショナリティに基づく差別を意味しない言語として定義されています。製品ソフトウェアのユーザーインターフェイスにハードコードされている言語、RFP のドキュメントに基づいて使用されている言語、または参照されているサードパーティ製品で使用されている言語によりドキュメントに例外が存在する場合があります。シスコのインクルーシブランゲージに対する取り組みの詳細は、こちらをご覧ください。
このドキュメントは、米国シスコ発行ドキュメントの参考和訳です。リンク情報につきましては、日本語版掲載時点で、英語版にアップデートがあり、リンク先のページが移動/変更されている場合がありますことをご了承ください。あくまでも参考和訳となりますので、正式な内容については米国サイトのドキュメントを参照ください。
設計フェーズは、ネットワーク トポロジ作成のための最初のステップです。設計フェーズでは、以下のセクションで説明されているタスクを実行します。
デザインの対象となるトポロジは、ノードと接続の機能で構成されています。ノードと接続の機能を選択し、編集する方法についての詳細は、Cisco Modeling Labs クライアント内のナビゲーション を参照してください。
|
ノード名 |
ノードのタイプ |
|---|---|
|
Cisco IOSv |
ルータ ノード。Cisco IOS オペレーティング システムを実行します。 |
|
Cisco IOSvL2 |
ルータ ノード。Cisco IOS レイヤ 2 オペレーティング システムを実行します。 |
|
Server |
サーバ ノード。Linux オペレーティング システムを実行します。 |
|
Cisco IOS XRv |
ルータ ノード。Cisco IOS XR オペレーティング システムを実行します。 |
|
Cisco IOS XRv 9000 |
ルータ ノード。Cisco IOS XR 9000 オペレーティング システムを実行します。(個別に利用可能です)。 |
|
Cisco CSR1000v |
ルータ ノード。Cisco CSR 1000 オペレーティング システムを実行します。(個別に利用可能です)。 |
|
Cisco ASAv |
ルータ ノード。Cisco ASAv オペレーティング システムを実行します。 |
|
Cisco NX-OSv 9000 |
ルータ ノード。Cisco Nx-OS 9000 オペレーティング システムを実行します。 |
ノードのサブタイプとは、OpenStack の上で動作する仮想マシンのことです。OpenStack それ自体は、VMware ソフトウェアの上で動作する Linux 仮想マシンの中で動作します。ノードは仮想であるため、特定のハードウェアをエミュレートするわけではありません。たとえば電源、ファン、ASIC、物理インターフェイスはありません。すべてのルータ ノードのインターフェイス タイプは、ギガビット イーサネット ネットワーク インターフェイスです。サーバ ノードには、イーサネット ネットワーク インターフェイスがあります。
イメージとイメージのフレーバーは、ノードのタイプごとに選択できます。VM のイメージと VM のフレーバーの選択肢にアクセスする方法については、『Cisco Modeling Labs Corporate Edition システム管理者のインストール ガイド、リリース 1.5』の「ユーザ ワークスペース管理」の章を参照してください。ほとんどの場合、イメージとフレーバーを選択する必要はありません。デフォルトでは、ノードのサブタイプはトポロジ内で動作するイメージとフレーバーに関連付けられています。
|
VM のイメージ名 |
用途 |
|---|---|
|
server |
サーバ ノード |
|
CSR1000v |
Cisco CSR1000 ノード |
|
IOSv |
Cisco IOS ノード |
|
IOSvL2 |
Cisco IOS レイヤ 2 ノード |
|
IOS XRv |
Cisco IOS XR ノード |
|
IOS XRv 9000 |
Cisco IOS XR 9000 ノード |
|
AVAv |
Cisco AVAv ノード |
|
Nx-OSv 9000 |
Cisco NX-OSv 9000 ノード |
|
VM のフレーバー名 |
用途 |
|---|---|
|
m1_tiny |
Linux サーバ |
|
m1_small |
Linux サーバ |
|
m1_medium |
Linux サーバ |
|
m1_large |
Linux サーバ |
|
m1_xlarge |
Linux サーバ |
|
server |
Linux サーバ |
|
CSR1000v |
Cisco CSR 1000 ノード |
|
IOS XRv |
Cisco IOS XR ノード |
|
IOS XRv 9000 |
Cisco IOS XR 9000 ノード |
|
IOSv |
Cisco IOS ノード |
|
IOSvL2 |
Cisco IOS レイヤ 2 ノード |
|
AVAv |
Cisco AVA ノード |
|
NX-OSv 9000 |
Cisco NX-OS 9000 ノード |
それぞれの Linux フレーバーでは、サーバに割り当てられるメモリの量と CPU が異なります。
Cisco Modeling Labs では、次の表に示すような接続機能を提供しています。
| 接続のタイプ | 説明 |
|---|---|
| Connection | 2 つのインターフェイスの間に接続を作成します。インターフェイスは、接続をサポートしているノードに作成されます。存在していて未使用のインターフェイスが自動的に割り当てられます。ルータ ノードのすべてのインターフェイスは、ギガビット イーサネット インターフェイスに対応します。複数の並列接続がサポートされています。 |
| External Router | 外部ルータの接続ポイントを作成します。
外部ルータをレイヤ 2 の外部 (Flat) ネットワークおよび IOSv インスタンスと組み合わせて使用する場合、AutoNetkit は透過的な方法で、シミュレーションをリモート デバイスに接続する、L2TPv3 トンネルを構成します。 |
| Layer 3 External (SNAT) | 静的ネットワーク アドレス変換 (SNAT) を使用して、レイヤ 3 外部接続ポイントを作成します。この外部接続ポイントを使えば、Cisco Modeling Labs の外部からトポロジに接続することができます。 |
| Layer 2 External (Flat) | FLAT を使用してレイヤ 2 の外部接続ポイントを作成します。この外部接続ポイントを使えば、Cisco Modeling Labs の外部からトポロジに接続することができます。 |
トポロジ プロジェクト フォルダが存在する必要があります。
トポロジを作成するにはいくつかの方法があります。この点については、以下のセクションで説明します。
| ステップ 1 |
トポロジ プロジェクト フォルダを選択します。 |
| ステップ 2 |
ファイル名を入力します。拡張子は .virl にします。 |
| ステップ 3 |
Finish をクリックします。 |
| ステップ 1 |
[プロジェクト] ビューを右クリックします。 |
| ステップ 2 |
を選択します。 |
| ステップ 3 |
トポロジ プロジェクト フォルダを選択します。 |
| ステップ 4 |
ファイル名を入力します。拡張子は .virl にします。 |
| ステップ 5 |
Finish をクリックします。 |
| ステップ 1 |
ツールバーで New Topology File アイコンをクリックします。 |
| ステップ 2 |
トポロジ プロジェクト フォルダを選択します。 |
| ステップ 3 |
ファイル名を入力します。拡張子は .virl にします。 |
| ステップ 4 |
Finish をクリックします。 |
ノードを設定します。
| ステップ 1 |
]ノード] の見出しを [パレット] ビューの下から見つけてノード タイプをクリックします。 |
||
| ステップ 2 |
ノードを配置する各ポイントのキャンバスをクリックします。それらを配置するキャンバスにノードをドラッグすることもできます。いくつかの方法を使用してノードを配置することができます。
|
接続とインターフェイスを作成します。
トポロジ エディタの Canvas にノードを配置する必要があります。
| ステップ 1 |
[Tools] ビューで Connection をクリックします。 |
||||
| ステップ 2 |
最初のノードをクリックします。 |
||||
| ステップ 3 |
次のノードをクリックして接続を作成します。
|
||||
| ステップ 4 |
すべての接続が完了するまで、手順 2 と手順 3 を繰り返します。
|
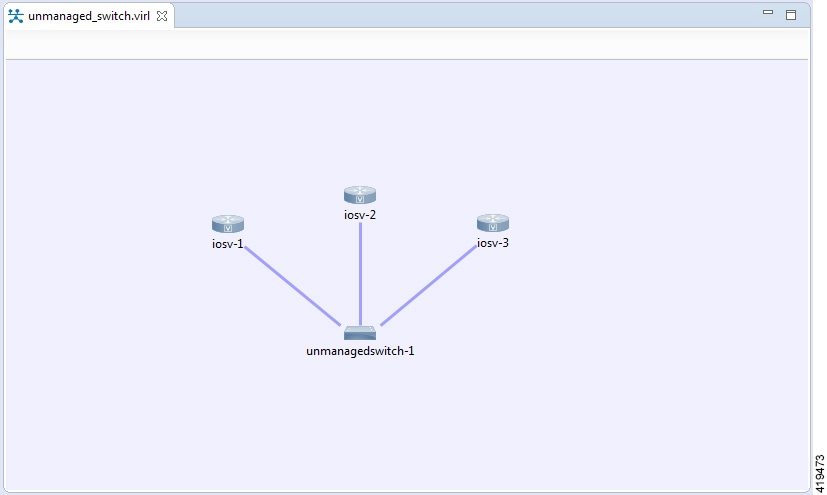
拡張子が .virl のトポロジ ファイルが存在する必要があります。ルータ ノードまたはサーバ ノードは、キャンバスに配置されます。オプションとして、ノード間に接続が存在していてもかまいません。
| ステップ 1 |
[Nodes] ビューで、[Unmanaged Switch] をクリックします。 |
| ステップ 2 |
アンマネージド スイッチを配置する、キャンバス上のエリアをクリックします。 |
| ステップ 3 |
[Tool] ビューで、[Connect] をクリックします。 |
| ステップ 4 |
キャンバスで、アンマネージド スイッチのノードをクリックし、それからエンド ノードをクリックします。接続が表示されます 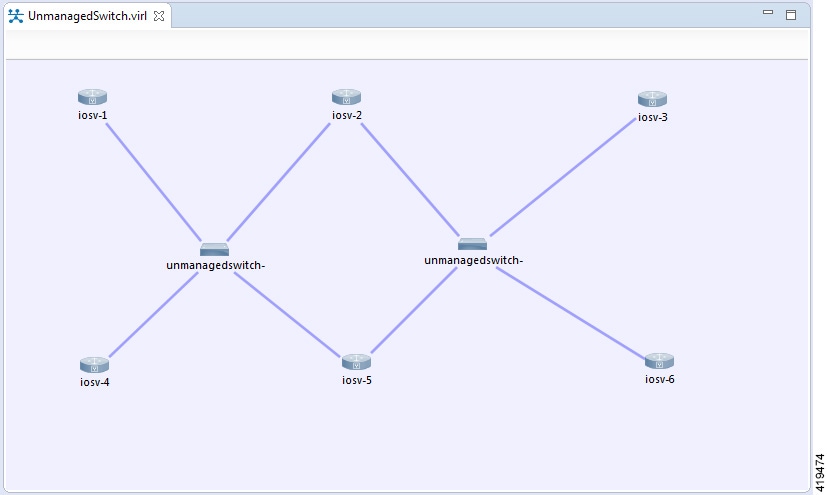 |
 (注) |
トポロジ内のすべての Cisco IOSvL2 スイッチ イメージは、ライセンスされたノード数の制限を超えていないかカウントされます。 |
Cisco IOSvL2 スイッチ イメージは、16 のギガビット イーサネット インターフェイスを提供します。インターフェイス Gi0/0 は OOB 管理のために予約されています。手動で設定することも、AutoNetkit を使用することもできます。
レイヤ 2 モード
レイヤ 3 モード
Cisco IOSvL2 スイッチに接続するようセットアップされたすべてのルータは、スイッチ ポート アクセス モードになります。デフォルトでは、すべてのルータが VLAN 2 に配置されます。ルータ インターフェイスの VLAN の属性を設定すれば、どの VLAN にポートを配置するか指定することができます。実行方法の詳細については、VLAN の割り当てを参照してください。
AutoNetkit を使用して構成されたスイッチ間接続は、デフォルトで 802.1q トランクとして動作するように設定されます。
| ステップ 1 |
[Nodes] ビューで、[IOSvL2] をクリックします。 |
| ステップ 2 |
IOSvL2 ノードを配置することが必要になった時点で、キャンバスをクリックします。ノードを配置するキャンバスに、ノードをドラッグすることもできます。 |
| ステップ 3 |
必要に応じて、ノード タイプを追加します。 |
| ステップ 4 |
[Connect]ツールを使用して、ノート間に接続を作成します。 |
| ステップ 5 |
どの VLAN にポートを配置するかを指定するには、適用可能なノードをダブルクリックして、ホストまたはルータのインターフェイスを選択します。 |
| ステップ 6 |
図に示すように、 で、[VLAN] フィールドの値を入力します。 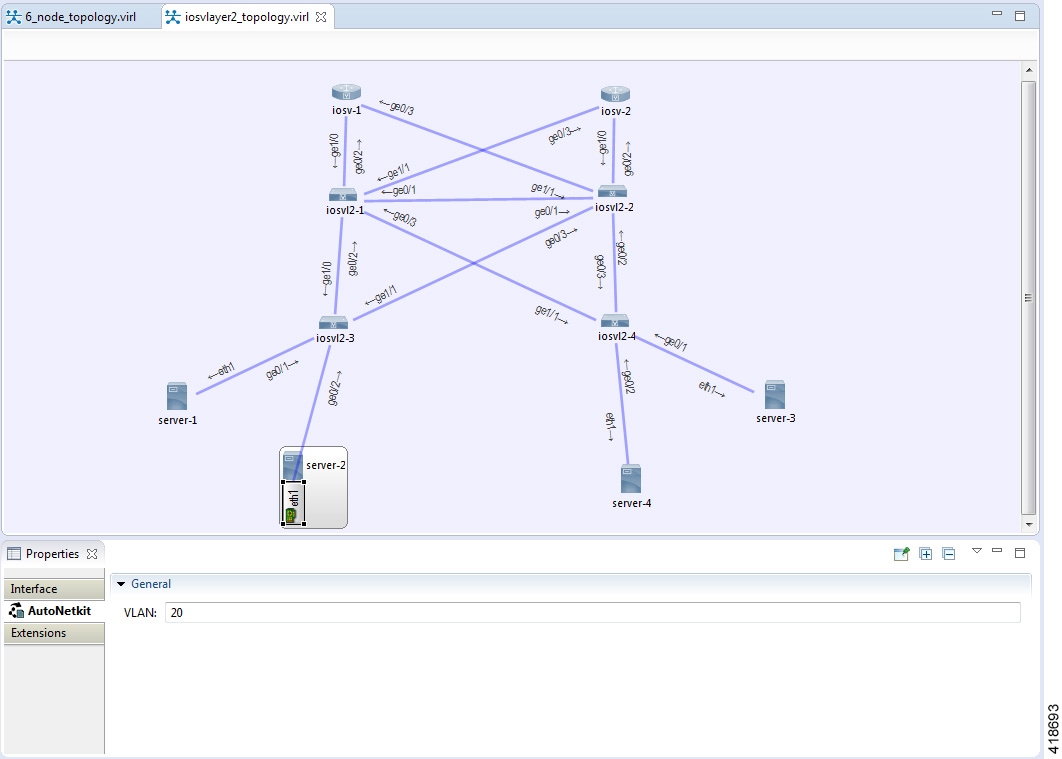 |
| ステップ 7 |
ツールバーで [Build Initial Configurations] をクリックして、AutoNetkit を使用してトポロジ用の構成を生成します。AutoNetkit による可視化を開くように要求されたら、[Yes] をクリックします。 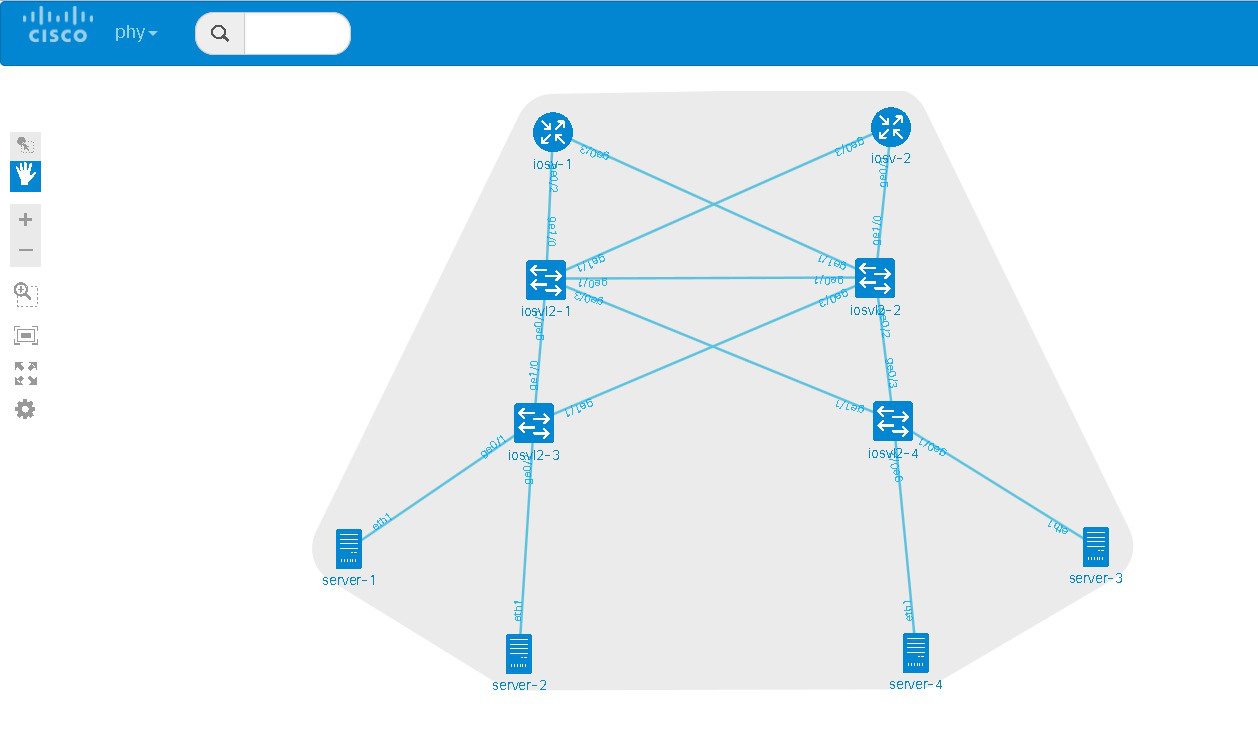 |
| ステップ 8 |
有効になっているすべてのブロードキャスト ドメインを表示するには、[phy] ドロップダウン リストから [layer2_conn] を選択します。たとえば、この例の server-2 にマウスを合わせると、同じ VLAN に属するルータとサーバが表示されます。他のデバイスはすべてグレー表示になります。 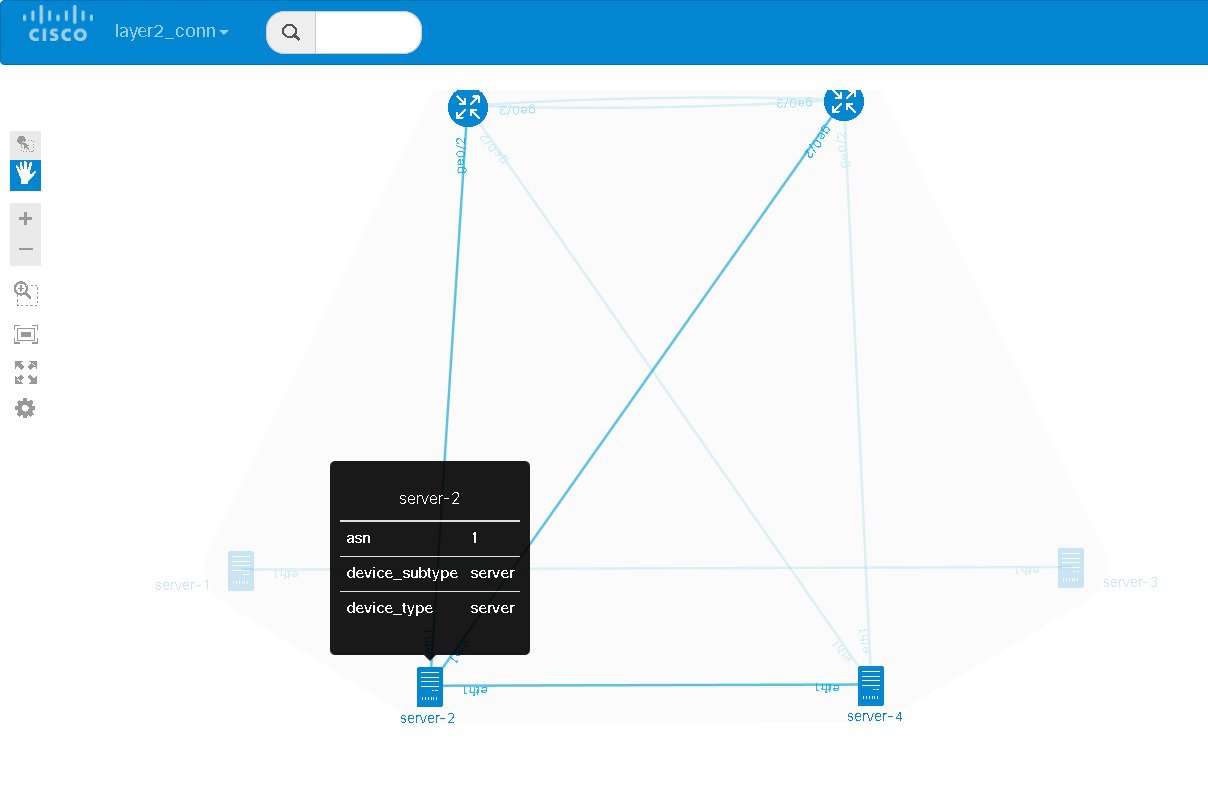 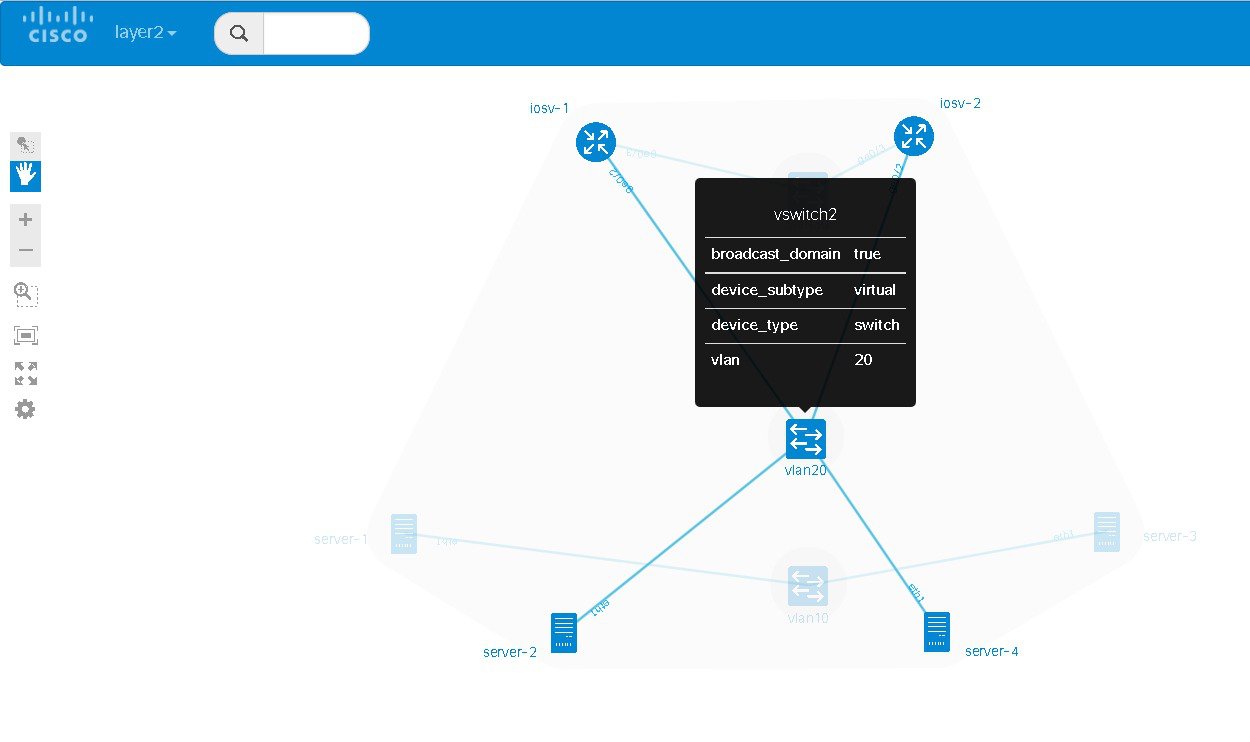 |
| ステップ 9 |
simulation.Cisco Modeling Labs クライアントで[Launch Simulation] tをクリックして、シミュレーションを開始します。 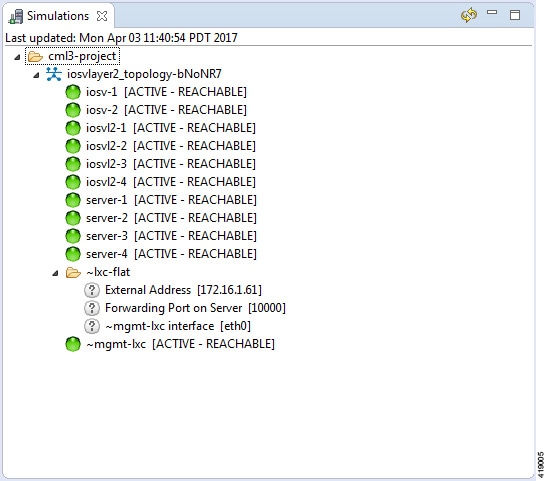 |
Cisco Modeling Labs は、Docker イメージを Cisco Modeling Labs トポロジに統合する機能を提供しています。
ユーザは、(hub.docker.com など) パブリック リポジトリまたはプライベート リポジトリから docker イメージを選択することができます。Cisco Modeling Labs サーバにダウンロードしたら、docker イメージを含むネットワーク トポロジを設計することができます。
Cisco Modeling Labs では、docker の機能は別の仮想マシンである CoreOS の内部に配置されます。これは docker インスタンスを実行するホストとしての役割を果たします。これには 2 つの理由があります。1 つはセキュリティ上の理由であり、もう 1 つは実行するインスタンス数を制約し、限定するためです。これは、様々な docker インスタンスのリソース利用量に対してメモリ上の管理を課することによって行います。
(注) |
ユーザは CoreOS 仮想マシン イメージをインストールする必要があります。これは、Cisco Modeling Labs FileExchange からインストールできます。アクセスが必要な場合は、cml-info@cisco.com にお問い合わせください。 |
docker インスタンスは多数利用することができますが、docker インスタンスが要求するメモリ量には注意する必要があります。CoreOS は、docker サービスを実行するとともに、それ自体 docker インスタンスであることを理解しておいてください。一度に実行できる docker インスタンスは 22 までであるという制限があります。この制限は、KVM がサポートするインターフェイスの数によって設定されています。
基本的な設定情報 (インターフェイスとルーティングの詳細) は、ビルドの初期設定機能を使用して AutoNetkit によって提供されます。シミュレーションの起動の一部として、CoreOS 仮想マシンがスピンアップし、その中で docker インスタンスが開始します。docker インスタンスは、シミュレーション内の他のノードに直接接続しているかのように表示されます。隣接するデバイスは、docker インスタンスをホストしているCoreOS VM の存在を認識しません。トポロジ デザイン内でリンクが作成されると、CoreOS インスタンスで外部タップ インターフェイスが作成されます。CoreOS VM は、2 GB の RAM および 2 つの vCPUs で実行するように設定されます。メモリの量が十分ではない場合には、[Node Resources/Flavors] 機能で調整できます。これはユーザ ワークスペース管理 インターフェイスにあります。
パブリック リポジトリには利用可能な幾千もの docker イメージが存在します。ただし、すべてのイメージが Cisco Modeling Labs (またはその他の docker 配備) で実行できるわけではないため、イメージを選択する際には注意する必要があります。
トポロジで統合 docker コンテナを使用するには、次の手順を実行します。
| ステップ 1 |
Cisco Modeling Labs サーバに docker イメージをダウンロードします。 |
| ステップ 2 |
ユーザ ワークスペース管理インターフェイスでは、図に示すように、で利用可能なサブタイプにアクセスできます。 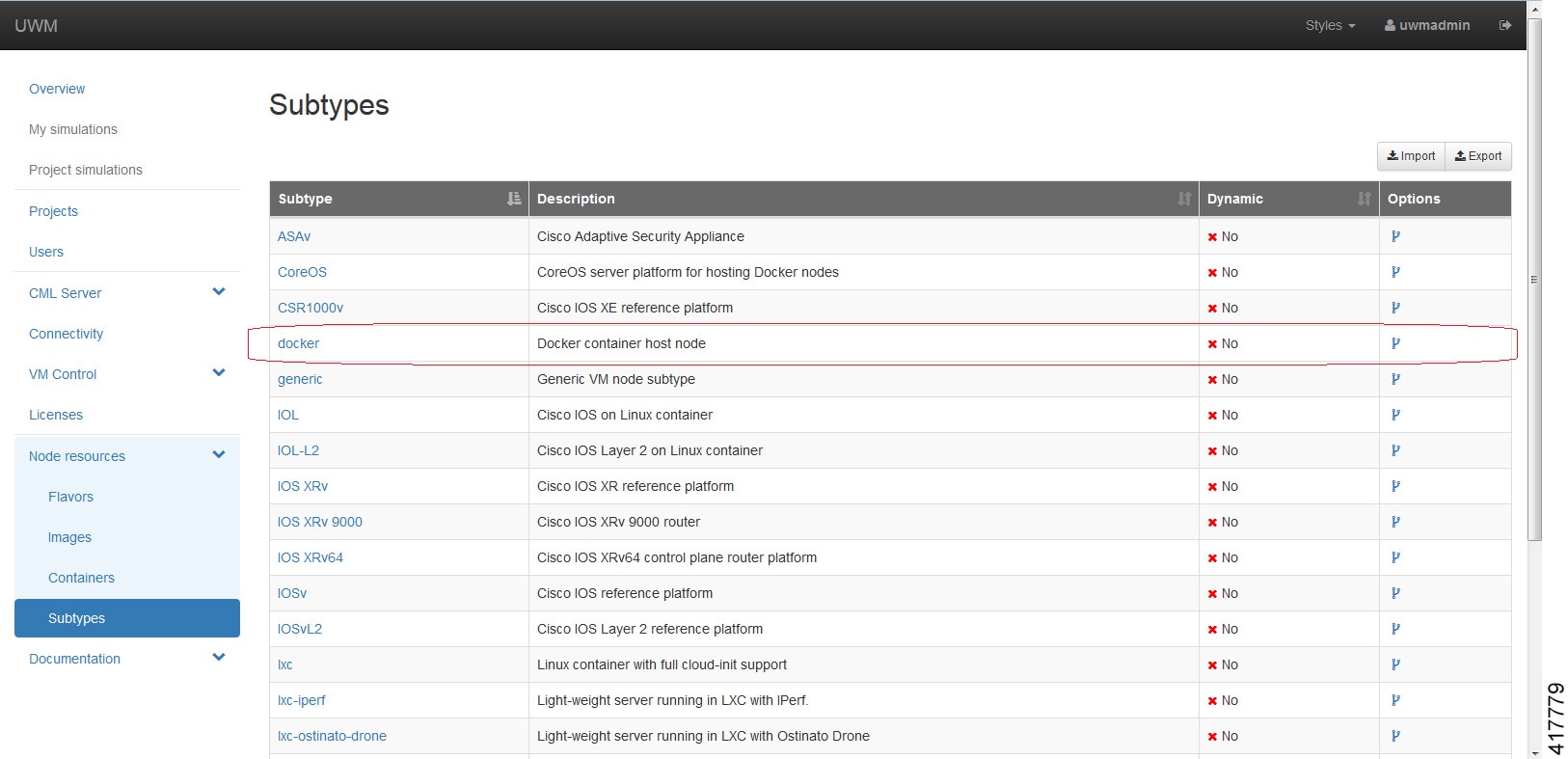 追加する Docker タイプごとに、 [Specialize] オプションを使用して用意されているテンプレートをクローンし、サブタイプを作成する必要があります。 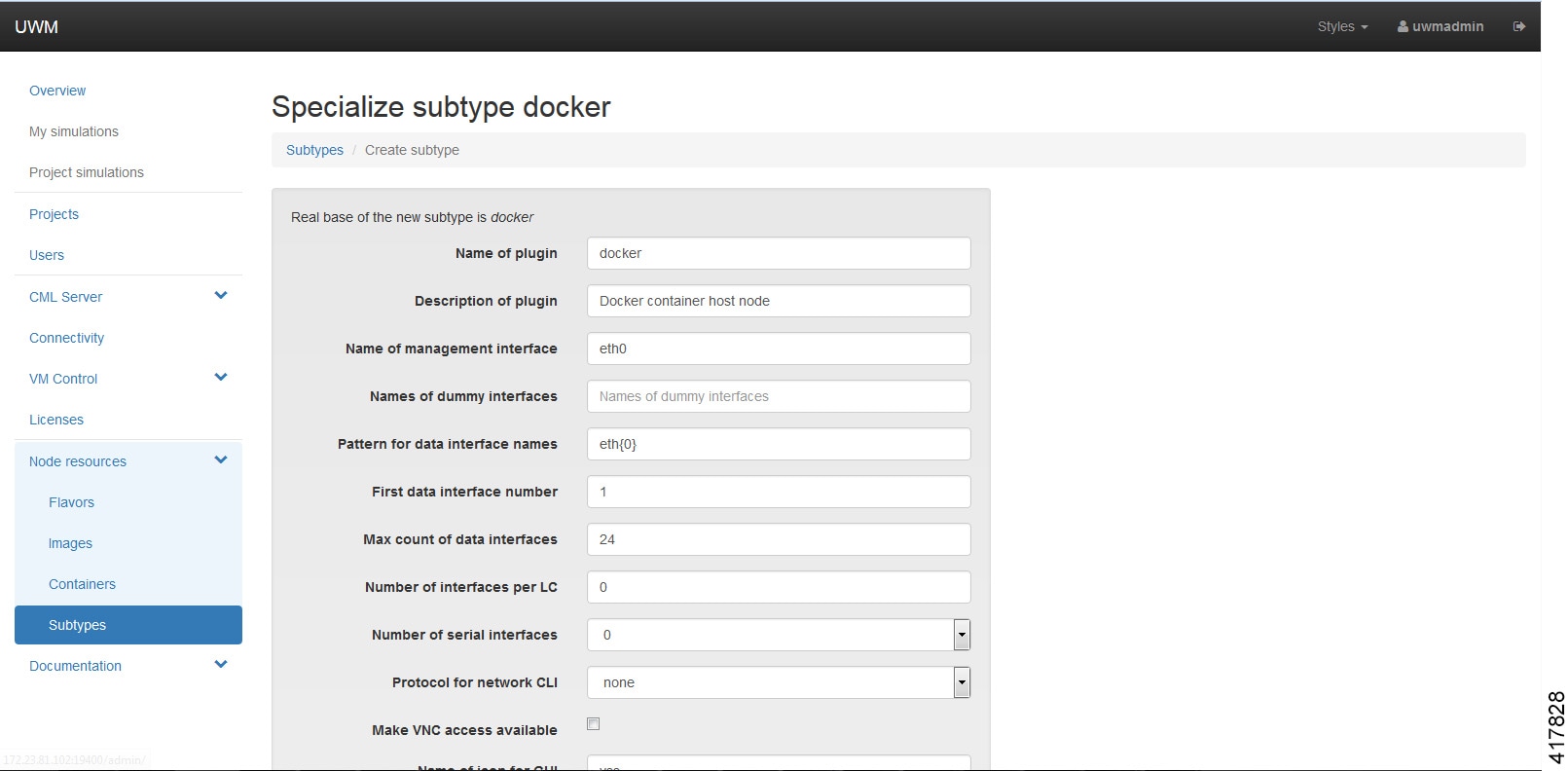
[作成(Create)] をクリックします。 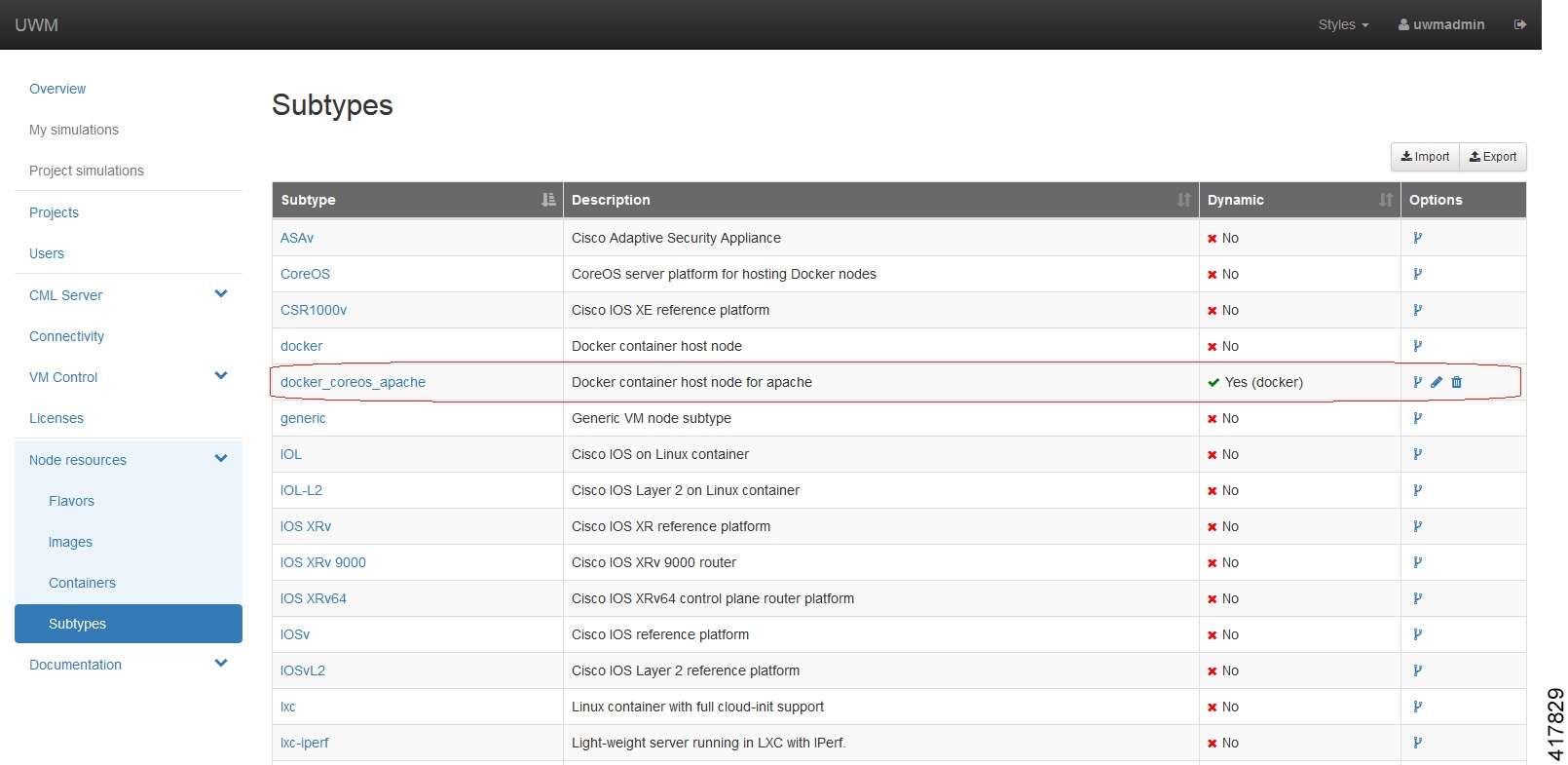 |
| ステップ 3 |
の下で、[Add] をクリックします。 Docker リポジトリを参照し、適用可能なイメージを検索します。たとえば coreos/apache です。オプションを選択し、適用可能な Docker の Pull コマンドをメモしておきます。たとえば |
| ステップ 4 |
[Create Docker Image] ページで、ドロップダウン リストから新たに作成した Docker サブタイプを選択します。 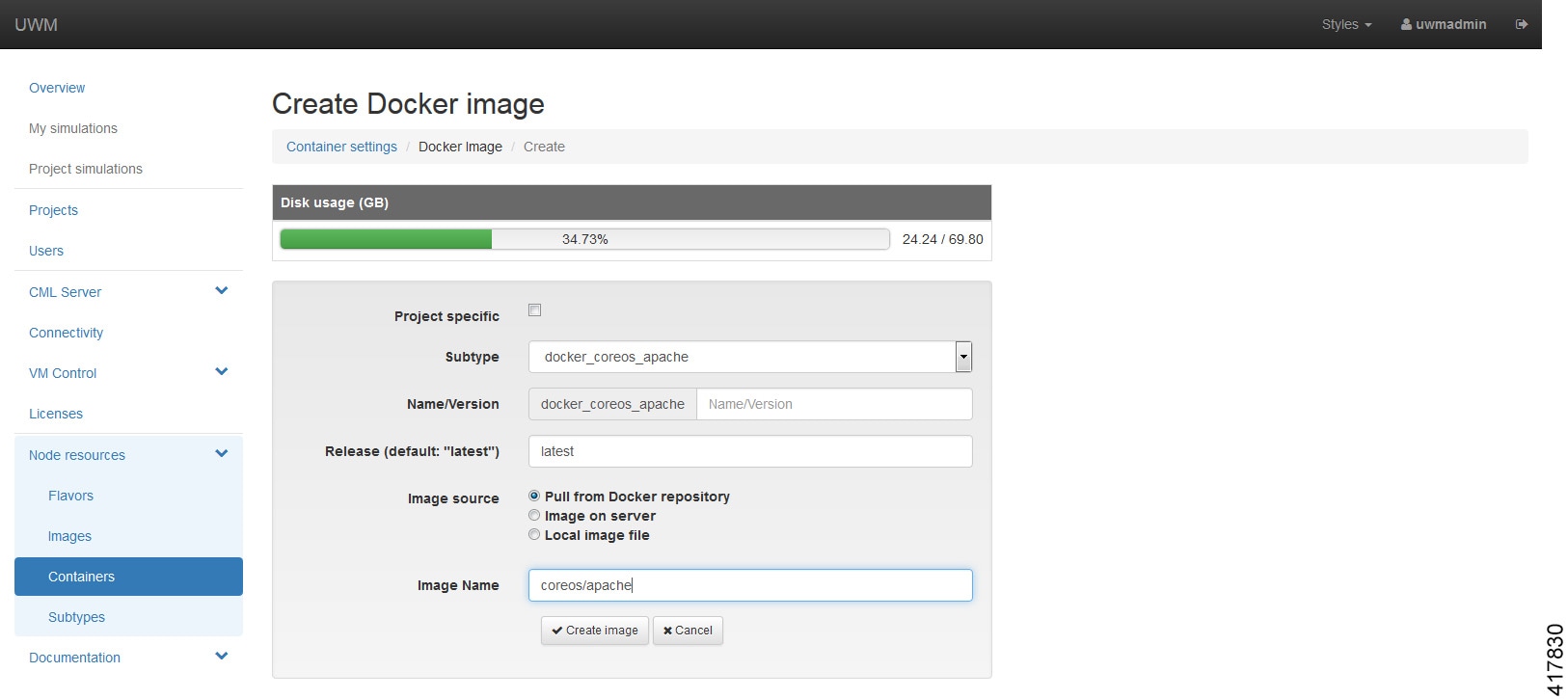 [Image Name] フィールドに、先ほどメモした Docker の Pull コマンドを入力します。[Create Image] をクリックします。 |
| ステップ 5 |
Cisco Modeling Labs トポロジで使用する Docker イメージを追加するには、Cisco Modeling Labs クライアントを開きます。 |
| ステップ 6 |
を選択し、[Fetch from Server] をクリックします。 |
 フィードバック
フィードバック