ベストプラクティスの理解APのAuto-Locate in Spaces AnyLocate
はじめに
このドキュメントでは、Cisco Spaces AnyLocateでのAP自動配置のベストプラクティスとトラブルシューティングについて説明します。
概要
Cisco Spaces AnyLocate(AP Auto-Locate)は、FTMレンジング、GNSS(GPS)データ、およびAP間の相対的な位置を使用して、フロアマップ上のアクセスポイントの配置を決定します。
このドキュメントでは、正確なAP配置と正しいレンジングを確実に行うための設定要件、ベストプラクティス、検証手順、およびトラブルシューティングガイダンスについて説明します。
前提条件
要件
次の項目に関する知識があることが推奨されます。
ワイヤレスLANコントローラ(WLC)の検証
これらの設定は、APの自動検索が正しく機能するために必須です。
FTMおよび地理位置情報
コントローラでFTMレンジングとAP位置情報を有効にする必要があります。
詳細については、次のシスコのドキュメントを参照してください。
-
位置情報の導出
これらの機能により、AP間の距離測定とGPSベースの測位が可能になります。
TDL(テレメトリ)サブスクリプション
スペースとWLC間のTDLサブスクリプションがアクティブである必要があります。これは、レンジングデータがリレーされるチャネルです。
- TDLサブスクリプション番号には、コネクタIDの先頭7桁が付き、末尾に[11-21]が付きます。
- 必要なTDLサブスクリプション、機能、および必要な各WLCコードの最小バージョン:
| サブスクリプションID |
TDL-URI |
最小バージョンが必要 |
| 11 |
/services;serviceName=ewlc_oper/rrmAPautoRfdot11データ |
常時存在 |
| 14 |
/services;serviceName=wncloudm_oper/ap_gnss_loc_data |
>=17.12.0 |
| 12 |
/services;serviceName=ewlc_oper/ap_sensor_cache |
>=17.12.0 |
| 13 |
/services;serviceName=ewlc_oper/ap_ranging_data |
>=17.12.0 |
| 17 |
/services;serviceName=ewlcevent/geo_loc_asc_meas |
>=17.12.2 |
| 18 |
/services;serviceName=ewlc_oper/cdp_cache_data |
>=17.12.0 |
| 20 |
/services;serviceName=ewlcevent/geoloc_disruptive_ranging |
>=17.13.0 |
| 21 |
/services;serviceName=ewlcevent/ap_movement |
>=17.13.0 |
| 22 |
/services;serviceName=ewlcevent/tdoa_events |
>=17.18.2 |
検証コマンド
- アクティブなサブスクリプションの表示
show telemetry ietf subscription all- サブスクリプションの詳細の表示
show telemetry ietf subscription <subscription-id> receiver- サブスクリプションの削除
(config)# no telemetry ietf subscription 使用するコンポーネント
このドキュメントの情報は、次のソフトウェアとハードウェアのバージョンに基づいています。
- Spaces Connector 3 - Location Service 3.1.0.94以降
- Catalyst 9800:最小バージョン17.12.1(917x APでは17.15)
- サポートされるAPモデル:9130、9136、9164、9166
- フロアマップのCADファイル – DWG形式(スペースにパブリッシュ)
- レンジング精度を確保するには、6 GHzを有効にする必要があります(6 GHzではWLANが有効)。
- AnyLocateは、デフォルトのCatalystサイトタグではサポートされていません(新しいサイトタグにAPを配置する必要があります)。
- ベータUIを使用する(スペースホームダッシュボードで編集)。
完成したCADファイルを[ロケーションとマップのスペース]([リッチマップ]セクション)にアップロードします。 CSV方式で作成できるロケーション階層要素に関連付ける必要があります。リッチマップの生成プロセスには、3日から2週間かかります。CADは、レイヤの基準と要件に基づいて拒否できます。
このドキュメントの情報は、特定のラボ環境にあるデバイスに基づいて作成されたものです。このドキュメントで使用するすべてのデバイスは、クリアな(デフォルト)設定で作業を開始しています。本稼働中のネットワークでは、各コマンドによって起こる可能性がある影響を十分確認してください。
NETCONF要件
AnyLocateはNETCONF/SSHを使用して、コントローラからAPリストをポーリングします。
スペースUIでNETCONFを有効にし、現在の資格情報を更新する必要があります。APリストが30日以内に適切にポーリングされない場合、APレンジングデータはスペースから削除されます
GPS検証
GNSSの機能を検証するには、次の手順に従います。
show gnss status-
APで受信されるサテライトの数を確認します。
-
信頼性の高いGPS測位には、最低4つのサテライトが必要です。
-
GPS検証は、クラウド側の検証とアンカー配置に最も適しています。
ベスト プラクティス
レンジング動作
ネイバーテーブルとレンジングデータが入力されるまで15分かかります。
少なくとも1つのWLANがアクティブになっていることを確認します。
-
5 GHz
-
6 GHz(レンジング精度を向上させるために推奨)
レンジング範囲
パフォーマンスの問題を回避するために、サイトタグはフロアごとまたは建物ごとに設定します。
-
次のいずれかのオプションを使用して、一度に250台のAPの範囲を設定することをお勧めします。
-
サイトごとのタグ、または
-
選択したAP
-

注:同時にレンジングするAPの数が多すぎると、一部のAPのレンジングデータが失われ、操作が不完全になる可能性があります。
運用上の考慮事項
APのレンジングはパフォーマンスに影響を与えるため、メンテナンス時間帯にスケジュールする必要があります。
デフォルトのFTMパラメータが推奨されます。
CADファイルの寸法が正確で、物理的なスペースと一致していることを確認します。
マップサービスの制限
Catalyst CenterマップがCisco Spacesにある場合:
-
AnyLocateマップをマップサービスにパブリッシュできません。
-
AnyLocateの結果を公開する前に、CatCフロアマップを削除する必要があります。
レンジングのトラブルシューティングコマンド
| WLC コマンド |
説明 |
| show ap geolocation ranging機能 |
レンジングに参加するAP機能の詳細 |
| show ap geolocation summary(ap位置情報の概要を表示) |
すべてのAPのgnssデータを提供 |
| show ap geolocation gnss-capable summary(ap位置情報gnss対応サマリーの表示) |
APがGPS対応かどうかを示します。 |
| show ap geolocation ranging request(ap位置情報レンジング要求) |
ping要求の送信先APとレポートの送信元AP |
| ap位置情報レンジングレポートの表示 |
すべてのFTM対応APから受信した最新および最適なレコードの完全なリストを提供 |
| ap位置情報レンジングステータスの表示 |
ネイバーAPによるAP間のレンジング検出を表示します。 |
| AP コマンド |
説明 |
| show ap name <gray-ap-name> geoレンジングステータス |
フロアマップ上でグレー表示されているAPのAP間レンジングステータス |
| スペースエンドポイント接続の詳細を表示 |
アクセスポイント(AP)レベルのGNSS関連情報 |
| show spaces endpoint key authentication(隠しコマンド) |
|
| show spaces endpoint keyアクセス |
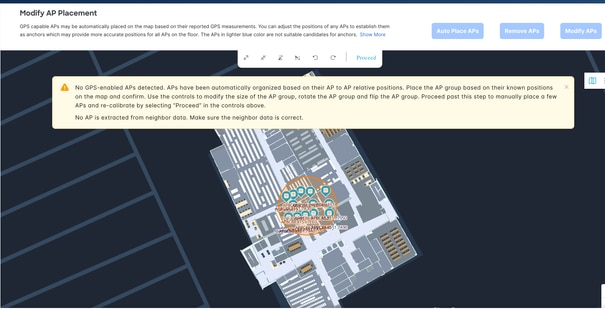
APの配置
APカラーキー
-
青色に点灯:アンカー可能、アルゴリズムにより決定(通常はエッジAP)
-
水色 – 標準範囲AP
-
グレー:レンジングデータなし
-
緑:ユーザが手動で配置したAP
APオーバーレイ
最初の配置は、AP間の相対距離に基づいて行われます。 したがって、これは実際の位置ではなく、距離に基づく相対的な位置を持つAPのクラスタだけです。
APオーバーレイをフロアマップに合わせて手動で回転する必要がある場合があります。 回転機能を使用してAPオーバーレイ全体を手動で回転させ、リッチマップの上に配置します
初期配置はマップの方向に合わせられず、APの位置に対して正確である可能性があります。
アンカーAPの要件
ネットワークに最低4 ~ 5台のアンカーAPがあり、その位置はGPSまたは既知の相対的な位置に基づく手動の配置によって決定できることを確認します。
これらのアンカーAPは、ネットワーク内の残りのAPの相対的な位置を計算するための参照点として使用されます。
GPSの考慮事項
GPSのアベイラビリティは次の要素に依存:
-
AP モデル
-
物理的な位置
-
ウィンドウとの近接性
-
1階のAPのGPS信号品質が低いことが多い。
分離とラインオブサイト
ラインオブサイトはレンジングに非常に重要です。APが独立している場合、または他のAPが受信するパスがない場合(少なくとも3つ)、レンジングデータは生成されません。
GPSモジュールがサテライト信号を取得できるように、APが窓の近くに取り付けられているか、空までの見通しの明確なラインがあることを確認します。
- 隣接するAPとリンクする
- 範囲を指定しない場合は、APを手動で配置する必要があります(グレーのAPとして表示されます)。
精度
精度は、前述の切り分け要因とラインオブサイト要因に大きく依存します。APが適切な範囲に配置されているかどうかを確認するには、物理的なスペースを確認する必要があります。
APの配置を最大限に行うには、システムの配置後にAPの配置を手動で行うことが強く推奨されます
APの配置は、APロケーション参照ポイントのRTLS要件により、資産とロケーションのトラッキングにダウンストリームの影響を与えます。
Cisco SpacesでのCatalyst Centerフロアマップイメージの削除
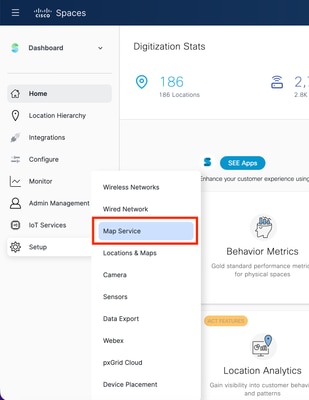
- Cisco Spacesダッシュボードにログインします。
- Setup > Map Serviceの順に移動します。
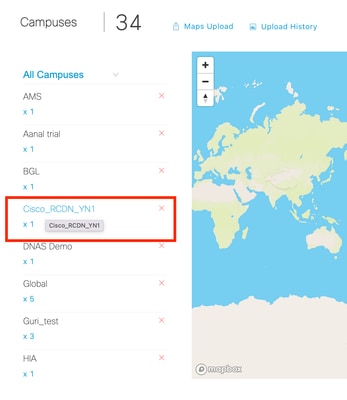
- ロケーション階層をドリルダウンします。
- キャンパス>ビル>フロア
キャンパス:
建物:
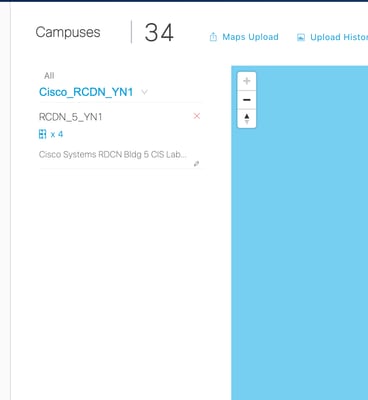
フロア:
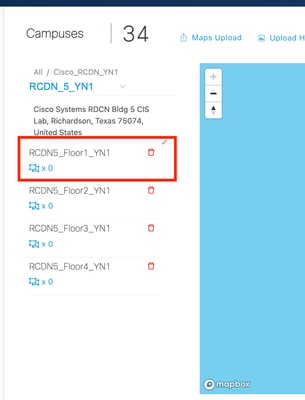
1. 削除する床を選択します。
2. フロアの横にある削除(ごみ箱)アイコンをクリックします。
3. 「Are you sure you want to delete the floor?」というプロンプトが表示されたら、Yesをクリックして確定します。
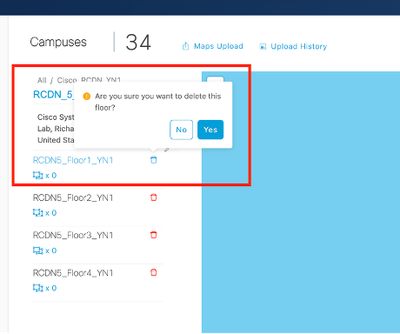
確認されると、フロアマップのイメージがCisco Spacesから削除されます。
更新履歴
| 改定 | 発行日 | コメント |
|---|---|---|
1.0 |
07-May-2026
|
初版 |
 フィードバック
フィードバック