Best practices voor automatische lokalisatie van AP-ruimten in AnyLocate begrijpen
Inhoud
Inleiding
In dit document worden de best practices en probleemoplossingen beschreven voor automatische lokalisatie van toegangspunten in Cisco Spaces AnyLocate.
Overzicht
Cisco Spaces AnyLocate (AP Auto-Locate) gebruikt FTM-bereik, GNSS-gegevens (GPS) en relatieve positionering van AP-naar-AP om de plaatsing van toegangspunten op vloerkaarten te bepalen.
Dit document bevat configuratievereisten, best practices, validatiestappen en richtlijnen voor probleemoplossing om ervoor te zorgen dat het toegangspunt nauwkeurig wordt geplaatst en met succes wordt gerangschikt.
Voorwaarden
Vereisten
Cisco raadt kennis van de volgende onderwerpen aan:
Validering van draadloze LAN-controller (WLC)
Deze configuraties zijn verplicht om het automatische lokalisatiesysteem van het toegangspunt correct te laten functioneren.
FTM en geolocatie
Het FTM-bereik en de AP-geolocatie moeten zijn ingeschakeld op de controller.
Raadpleeg de documentatie van Cisco:
-
geolocatieafleiding
Deze functies maken AP-naar-AP afstandsmetingen en GPS-gebaseerde positionering mogelijk.
TDL (Telemetrie) abonnementen
TDL-abonnementen tussen Spaces en WLC moeten actief zijn. Dit is het kanaal waarlangs data wordt doorgegeven.
- Het TDL-abonnementsnummer is voorafgegaan door de eerste 7 cijfers van de Connector-ID, gevolgd door [11-21].
- Vereiste TDL-abonnementen, -functies en de vereiste minimale WLC-codeversies:
| Abonnement-ID |
TDL-URI |
min-versie vereist |
| 11 |
/services; serviceName=ewlc_oper/rrmAPautoRefdot11Data |
Altijd aanwezig |
| 14 |
/services; serviceName=wncloudm_oper/ap_gnss_loc_data |
>=17,12,0 |
| 12 |
/services; serviceName=ewlc_oper/ap_sensor_cache |
>=17,12,0 |
| 13 |
/services; serviceName=ewlc_oper/ap_ranging_data |
>=17,12,0 |
| 17 |
/services; serviceName=ewlcevent/geo_loc_asc_meas |
>=17,12,2 |
| 18 |
/services; serviceName=ewlc_oper/cdp_cache_data |
>=17,12,0 |
| 20 |
/services; serviceName=wellcevent/geoloc_disruptive_ranging |
>=17,13,0 |
| 21 |
/services; serviceName=ewlcevent/ap_movement |
>=17,13,0 |
| 22 |
/services; serviceName=ewlcevent/tdoa_events |
>=17,18,2 |
Validatiecommando's
- Actieve abonnementen weergeven
show telemetry ietf subscription all- Abonnementsdetails weergeven
show telemetry ietf subscription <subscription-id> receiver- Abonnement verwijderen
(config)# no telemetry ietf subscription Gebruikte componenten
De informatie in dit document is gebaseerd op de volgende software- en hardware-versies:
- Spaces Connector 3 - Locatieservice 3.1.0.94 of hoger
- Catalyst 9800 - Minimumversie 17.12.1 (17.15 voor 917x AP's)
- Ondersteunde AP-modellen - 9130, 9136, 9164, 9166
- CAD bestand van floormap - DWG formaat (Gepubliceerd in Spaces)
- 6 GHz moet ingeschakeld zijn voor nauwkeurigheid van het bereik (WLAN ingeschakeld voor 6 GHz).
- AnyLocate wordt niet ondersteund voor de standaardsitetag van Catalyst (moet toegangspunten in de nieuwe sitetag plaatsen).
- Gebruik Beta UI (Bewerken in Spaces Home dashboard).
Upload een voltooid CAD-bestand naar Spaces in Locations & Maps (Rich Maps-sectie). Het moet gekoppeld zijn aan een element Locatiehiërarchie dat kan worden gemaakt op basis van de CSV-methode. Het genereren van de Rich Map kan 3 dagen tot 2 weken duren. CAD kan worden afgewezen op basis van laagcriteria en vereisten.
De informatie in dit document is gebaseerd op de apparaten in een specifieke laboratoriumomgeving. Alle apparaten die in dit document worden beschreven, hadden een opgeschoonde (standaard)configuratie. Als uw netwerk live is, moet u zorgen dat u de potentiële impact van elke opdracht begrijpt.
NETCONF-vereiste
AnyLocate gebruikt NETCONF/SSH om de lijst met toegangspunten te peilen vanaf de controller.
NETCONF moet zijn ingeschakeld en de huidige referenties moeten worden bijgewerkt in de UI Spaces. Als de lijst met toegangspunten niet binnen 30 dagen goed is gepolst, worden de gegevens voor het bereik van toegangspunten uit ruimten verwijderd
GPS-validatie
GNSS-functionaliteit valideren:
show gnss status-
Controleer het aantal satellieten dat door toegangspunten wordt gehoord.
-
Er zijn minimaal 4 satellieten nodig voor een betrouwbare GPS-positionering.
-
GPS-validatie is het meest geschikt voor cloud-side validatie en ankerplaatsing.
beste praktijken
Variërend gedrag
Sta 15 minuten toe voor de tabellen met buren en het bereik van de gegevens die moeten worden ingevuld.
Zorg ervoor dat ten minste één WLAN actief is op:
-
5 GHz
-
6 GHz (aanbevolen voor verbeterde bereiknauwkeurigheid)
Bereik
Om prestatieproblemen te voorkomen, worden sitetags geconfigureerd op basis van een verdieping of per gebouw:
-
Met een bereik van minder dan 250 toegangspunten per keer wordt aanbevolen via een van de volgende opties:
-
Per-site tag, of
-
Geselecteerde toegangspunten
-

Opmerking: als u te veel toegangspunten tegelijk gebruikt, kunt u sommige toegangspunten verlaten zonder gegevens en onvolledige bewerkingen te variëren.
Operationele overwegingen
Het bereik van het toegangspunt is van invloed op de prestaties en moet worden gepland tijdens een onderhoudsvenster.
Standaard FTM-parameters worden aanbevolen.
Zorg ervoor dat CAD-bestanden dimensionaal nauwkeurig zijn en overeenkomen met de fysieke ruimte.
Beperking kaartservice
Als er Catalyst Center-kaarten bestaan in Cisco Spaces:
-
AnyLocate-kaarten kunnen niet worden gepubliceerd in de kaartenservice.
-
De CatC-plattegrond moet worden verwijderd voordat de resultaten van AnyLocate worden gepubliceerd.
Opdrachten voor probleemoplossing
| WLC-opdrachten |
Beschrijving |
| AP Geolocation Ranging Capability weergeven |
Details AP mogelijkheid om deel te nemen aan het bereik |
| Overzicht AP Geolocation weergeven |
Geeft GNSS-gegevens voor alle toegangspunten |
| Samenvatting van de GPS-geolocatie tonen |
Geeft aan of de toegangspunten geschikt zijn voor GPS of niet. |
| Aanvraag voor bereik van AP-geolocatie weergeven |
AP's waarnaar een pingverzoek wordt verzonden en AP's waarvan rapporten worden ontvangen |
| Rapport AP Geolocation Ranging weergeven |
Geeft een volledige lijst van alle nieuwste en beste records die zijn ontvangen van alle geschikte FTM-toegangspunten |
| Geolocatiebereikstatus toegangspunt weergeven |
Toont detectie van het bereik van AP tot AP met aangrenzende AP's. |
| AP-opdrachten |
Beschrijving |
| AP-naam <Gray-AP-name> geobereikstatus weergeven |
De status AP-tot-AP-bereik voor een toegangspunt dat grijs wordt weergegeven op de plattegrond |
| Details eindpuntverbinding ruimten weergeven |
GNSS-gerelateerde informatie op het niveau van het toegangspunt (AP) |
| Verificatie van eindpuntsleutel voor ruimten weergeven |
|
| Toegang tot eindpuntsleutel voor ruimten weergeven |
AP-plaatsing
AP-kleurtoets
-
Solid Blue – Anker-mogelijk, bepaald door algoritme (meestal rand-AP's)
-
Lichtblauw – standaard AP
-
Grijs – geen gegevens voor bereik
-
Groen – Handmatig geplaatst door gebruiker
AP-bedekking
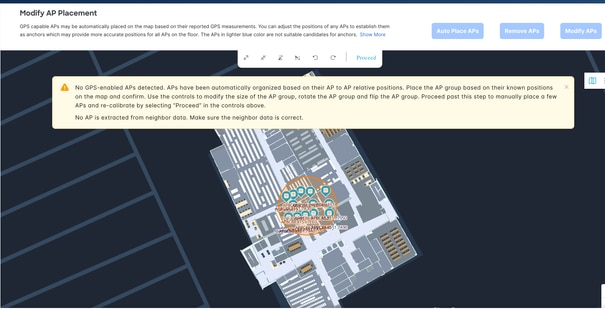
De eerste plaatsing is ankerloos, op basis van de relatieve afstand tussen AP en AP. Vandaar dat dit niet de werkelijke positie is, alleen het cluster van AP's met hun relatieve positie op basis van hun afstanden.
De AP-overlay kan handmatige rotatie vereisen om uit te lijnen met de vloerkaart. Gebruik de rotatiefunctie om de volledige AP-bedekking handmatig te draaien om bovenop de Rich maps te zitten
Het is mogelijk dat de eerste plaatsing niet is uitgelijnd met de oriëntatie van de kaart, maar juist is ten opzichte van de locatie van het toegangspunt.
AP-vereiste voor anker
Zorg ervoor dat het netwerk minimaal 4-5 anker-AP's heeft waarvan de locaties kunnen worden bepaald via GPS of handmatige plaatsing op basis van bekende relatieve posities.
Deze anker-AP's worden gebruikt als referentiepunten om de relatieve posities van de resterende AP's in het netwerk te berekenen.
GPS-overwegingen
De beschikbaarheid van GPS is afhankelijk van:
-
AP-model
-
Fysieke locatie
-
Nabijheid van ramen
-
AP's op de eerste verdieping hebben vaak een slechte GPS-signaalkwaliteit.
Isolatie en Line-of-Sight
Line-of-sight is erg belangrijk voor het bereik. Als een toegangspunt is geïsoleerd of geen pad heeft dat door andere toegangspunten kan worden gehoord (ten minste 3), genereert het geen bereikgegevens.
Zorg ervoor dat het toegangspunt in de buurt van een raam is gemonteerd of een duidelijke zichtlijn naar de hemel heeft zodat de GPS-module het satellietsignaal kan verkrijgen:
- Het verbindt met naburige AP's.
- Wanneer het niet is gerangschikt, moet de gebruiker AP handmatig plaatsen. (Weergegeven als grijs AP).
juistheid
Nauwkeurigheid is sterk afhankelijk van de eerder genoemde isolatie en zichtlijnfactoren. Een beoordeling van de fysieke ruimte is mogelijk vereist om te bevestigen of toegangspunten op de juiste manier zijn geplaatst.
Enige handmatige interventie bij plaatsing van AP wordt sterk aanbevolen na plaatsing van het systeem om de hoogste graad van plaatsing van AP te garanderen
Plaatsing van toegangspunten heeft downstream-effecten op het volgen van bedrijfsmiddelen en locaties vanwege de RTLS-vereisten van het referentiepunt van de locatie van het toegangspunt.
Een afbeelding van de Catalyst Center-vloerkaart verwijderen in Cisco Spaces
- Log in op het Cisco Spaces-dashboard.
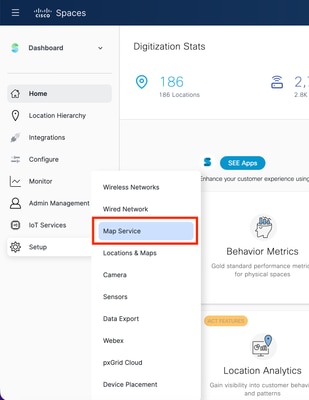
- Navigeer naar Instellen > Kaartenservice.
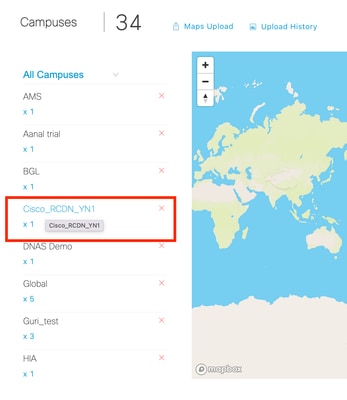
- Doorloop de locatiehiërarchie:
- Campus > Gebouw > Vloer
Campus:
Gebouw:
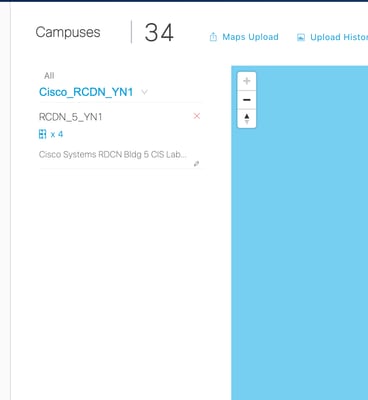
Verdieping:
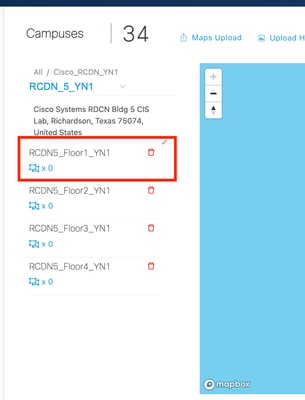
1. Selecteer de vloer die u wilt verwijderen.
2. Klik op het pictogram Verwijderen (prullenbak) naast de vloer.
3. Wanneer u wordt gevraagd of u de vloer wilt verwijderen, klikt u op Ja om te bevestigen.
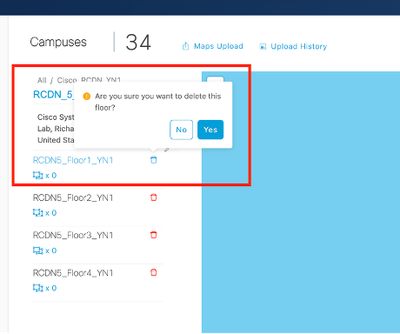
Na bevestiging wordt de afbeelding van de plattegrond verwijderd uit Cisco Spaces.
Revisiegeschiedenis
| Revisie | Publicatiedatum | Opmerkingen |
|---|---|---|
1.0 |
07-May-2026
|
Eerste vrijgave |
 Feedback
FeedbackContact Cisco
- Een ondersteuningscase openen

- (Vereist een Cisco-servicecontract)