Introduction
Ce document décrit comment installer des pilotes de périphériques sur Cisco Unified Computing System (UCS) pour les systèmes d'exploitation courants.
Conditions préalables
Exigences
Cisco vous recommande de prendre connaissance des rubriques suivantes :
- Cisco UCS Manager
- Contrôleur de gestion intégré Cisco (CIMC)
- Virtual Machine-ware (VMware), Windows Server ou les systèmes d'exploitation Linux
Composants utilisés
Les informations contenues dans ce document sont basées sur les plates-formes matérielles suivantes :
The information in this document was created from the devices in a specific lab environment. All of the devices used in this document started with a cleared (default) configuration. Si votre réseau est en ligne, assurez-vous de bien comprendre l’incidence possible des commandes.
Informations générales
Définition du pilote
Un pilote de périphérique est un logiciel qui constitue l'interface entre le système d'exploitation et le matériel. Le pilote de périphérique traduit les commandes générales du système d'exploitation en commandes spécialisées pour un périphérique particulier, ce qui permet au système d'exploitation de communiquer avec les périphériques matériels.
Périphériques nécessitant un pilote
Voici une liste des périphériques matériels qui nécessitent des pilotes de périphériques :
- Carte d'interface réseau Ethernet (ENIC)
- Carte d'interface réseau Fibre Channel (FNIC)
- Contrôleur RAID (Redundant Array of Independent Disks)
- Chipset de carte mère
- Carte vidéo
- Module de plateforme sécurisée (TPM)
Comparaison des pilotes et du micrologiciel
Les pilotes de périphériques sont différents du micrologiciel. Le pilote de périphérique est installé sur le système d'exploitation, tandis que le micrologiciel est un code de niveau inférieur installé sur les périphériques matériels. Le micrologiciel est stocké dans une mémoire non volatile, telle que la mémoire ROM, la mémoire ROM programmable effaçable (EPROM) ou la mémoire flash.
Dépendance du pilote au micrologiciel
Les pilotes de périphériques dépendent fortement du micrologiciel du périphérique. Les pilotes de périphériques doivent être compatibles avec le niveau du micrologiciel d'un périphérique matériel, afin qu'ils communiquent correctement entre eux ; les fonctionnalités du pilote et du micrologiciel doivent correspondre pour que le fonctionnement soit correct.
Quand les pilotes doivent être installés et mis à jour
Les pilotes de périphériques sont préinstallés avec les systèmes d'exploitation (tels que les images Cisco OEM VMware ESXi) ou peuvent être installés manuellement après la configuration du système d'exploitation.
Les pilotes de périphériques doivent généralement être mis à jour après ces procédures :
- Mises à niveau du micrologiciel UCS
- Mises à niveau/correctifs majeurs du système d'exploitation
Versions de pilote requises
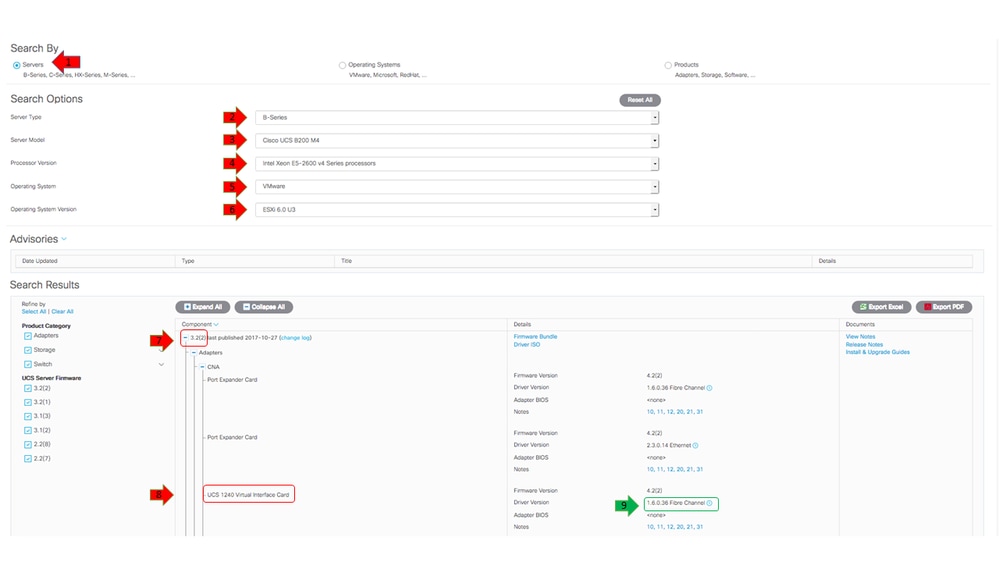
La matrice d'interopérabilité matérielle et logicielle UCS présente les versions de pilote requises pour une combinaison particulière de système d'exploitation, de périphérique et de microprogramme.
Avertissement : les versions de pilote répertoriées dans la matrice ont été testées et vérifiées par l'équipe d'assurance qualité de l'ingénierie Cisco, et il est essentiel d'installer le pilote approprié ; sinon, comportement inattendu pouvant entraîner des pannes de réseau.
Cet exemple montre qu'une version de pilote FNIC de 1.6.0.36 est requise pour un B200 M4 avec une carte d'interface virtuelle (VIC) 1240 qui exécute ESXi 6.0 U3, sur UCS version 3.2.2.
Télécharger le bundle de pilotes
Complétez ces étapes afin de télécharger le bundle de pilotes :
- Dans un navigateur Web, accédez au site Web de Cisco
- Sous Support, cliquez sur Download Software.
- Cliquez sur Unified Computing and Servers.
- Sélectionnez votre serveur. Les pilotes Cisco UCS sont disponibles pour les serveurs lames Cisco UCS série B et les serveurs rack Cisco UCS série C.
- Cliquez sur Pilotes UCS (Unified Computing System).
- Sélectionnez l'offre que vous souhaitez télécharger, puis cliquez sur Télécharger maintenant.
Conseil : Lorsque vous choisissez le bundle de pilotes à télécharger, il est important de sélectionner la version du bundle de pilotes la plus similaire à la version du microprogramme du serveur. Par exemple, si vous exécutez UCS-B version 3.2(2b), l'offre groupée de pilotes VMware ucs-bxxx-drivers-vmware.3.2.2.iso est requise.
Conseil : La plupart des pilotes VMware ESXi sont téléchargés directement à partir de VMware, avec une recherche de la version du pilote. C'est souvent plus rapide que si vous téléchargiez l'ensemble des pilotes.
Identifier le matériel du serveur
Avant de sélectionner le pilote approprié, vous devez identifier les périphériques matériels installés sur le serveur. Cette section décrit comment rechercher les périphériques situés sur UCS Manager et dans CIMC.
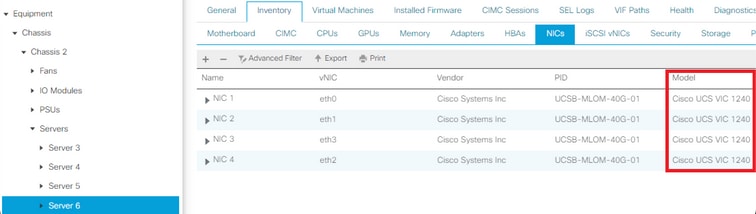
Gamme UCS B
Cet exemple montre comment rechercher l'inventaire des serveurs dans UCS Manager. Le serveur 1/1 est équipé de deux modèles d'adaptateur : la carte VIC 1240.
Gamme UCS C
Cet exemple montre comment rechercher les périphériques matériels du serveur dans le CIMC. Un contrôleur RAID d'adaptateur de bus hôte SAS modulaire Cisco12G est installé sur le serveur.

Identification de la version du micrologiciel UCS
Avant de sélectionner la version de pilote appropriée, vous devez identifier la version UCS. Cette section décrit comment identifier la version actuelle d'UCS installée sur les serveurs.
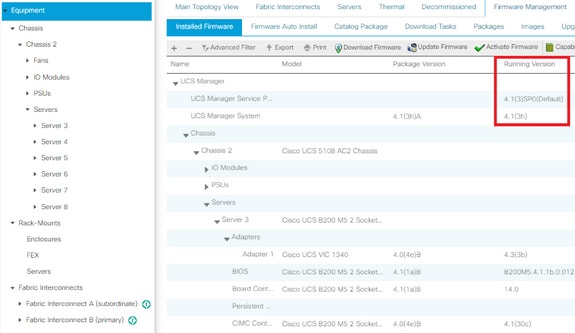
Gamme UCS B
Dans cet exemple, la gamme UCS B exécute UCS version 4.1(3h)
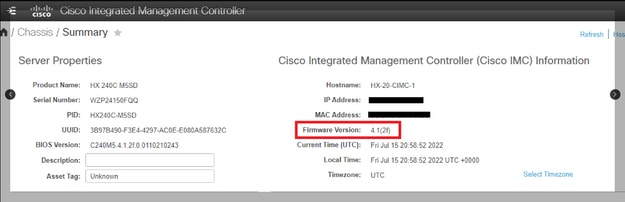
Gamme UCS C
Dans cet exemple, la gamme UCS série C exécute UCS version 4.1(2f).
Caractéristiques du SE
Cette section décrit comment vérifier les versions des pilotes et comment installer des pilotes sur des systèmes d'exploitation courants.
VMware ESXi
Utilisez ces commandes afin de vérifier les versions actuelles des pilotes et la version de VMware :
Conseil : Ces commandes sont exécutées à partir de l'interface de ligne de commande ESXi. Secure Shell (SSH) doit être activé avant le lancement d'une session SSH.
| Commande |
Description |
| vmware -vl |
Affiche le niveau de version et de correctif VMware. |
| esxcli software profile get |
Affiche le type d'installation ISO. |
| esxcfg-scsidevs -a |
Répertorie les hôtes HBA et le nom du pilote associé. |
| esxcfg-nics -l |
Répertorie les modèles de cartes d'interface réseau (NIC) et de cartes virtuelles hôtes. |
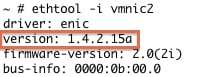
| ethtool -i vmnicX |
Affiche le pilote Ethernet utilisé par la carte réseau virtuelle spécifiée. |
| carte réseau esxcli get -n vmnicX |
Affiche le pilote Ethernet utilisé par la carte réseau virtuelle spécifiée sur ESXi 6.5. |
| vmkload_mod -s fnic |
Affiche la version du pilote de l'adaptateur de bus hôte (HBA) pour la carte d'interface virtuelle Cisco. |
| vmkload_mod -s enic |
Affiche la version du pilote Ethernet de la carte d'interface virtuelle Cisco. |
| vmkload_mod -s nenic |
Affiche la version du pilote Ethernet de la carte d'interface virtuelle Cisco pour ESXi 6.5 et versions ultérieures. |
| vmkload_mod -s megaraid_sas |
Affiche la version du pilote LSI MegaRAID. |
| vmkload_mod -s lsi_mr3 |
Affiche la version du pilote LSI lsi_mr3 (pilote natif sur ESXi 6.7). |
| vmkload_mod -s nom_pilote |
Affiche la version du pilote pour un pilote spécifié. |
Ces exemples montrent que vmnic2 utilise une carte d'interface virtuelle Cisco et la version de pilote 1.4.2.15a.

Ces exemples montrent que l'adaptateur de bus hôte (HBA) Qlogic utilise le pilote qla2xxx Version 901.1k.1-14vmw.


Installation du pilote
Complétez ces étapes afin d'installer le pilote :
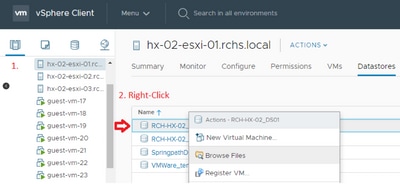
- Extrayez le contenu du fichier zip du pilote et identifiez le fichier *.vib.
- Utilisez le navigateur du data store afin de télécharger le fichier *.vib vers un data store hôte ESXi.
- Passez l’hôte en mode Maintenance.
- Installez le pilote.
ESXi 5.x/6.x
Utilisez cette commande afin d'installer le pilote sur ESXi version 5.x/6.x :
esxcli software vib install –v /path/async-driver.vib

Remarque : si les pilotes nécessitent une vérification de signature, exécutez cette commande avec le commutateur —no-sig-check. Assurez-vous d'utiliser le chemin d'accès complet au fichier.
ESXi 4.x
Utilisez cette commande afin d'installer le pilote sur ESXi version 4.x :
esxupdate --bundle=offline-bundle.zip update
Terminer l'installation
Après avoir installé le pilote avec l'une des commandes mentionnées précédemment, quittez le mode Maintenance et redémarrez l'hôte. Pour plus d'informations sur l'installation des pilotes, reportez-vous à la section Informations connexes à la fin de ce document.
Commandes CLI VMware utiles
Voici quelques autres commandes VMware utiles que vous pouvez utiliser lorsque vous installez un pilote :
Vérifier l'état du mode maintenance
vim-cmd hostsvc/hostsummary | grep -i maintenace
Rechercher des machines virtuelles sous tension
vim-cmd vmsvc/getallvms
Mise hors tension des machines virtuelles
vim-cmd vmsvc/power.off <vm id>
Passer en mode maintenance
vim-cmd hostsvc/maintenace_mode_enter
Quitter le mode Maintenance
vim-cmd hostsvc/maintenace_mode_exit
Microsoft Windows Server
Cette section décrit comment installer un pilote sur un serveur Microsoft Windows.
Vérifier la version actuelle du pilote
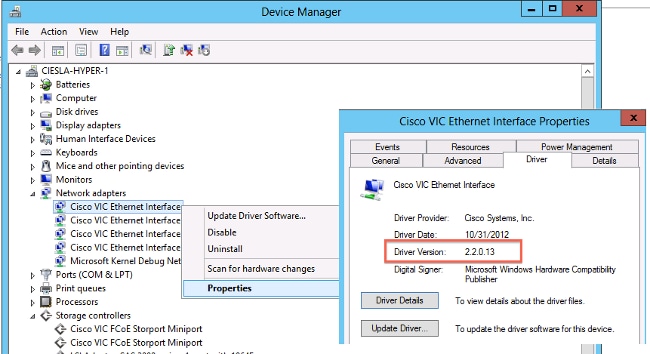
Afin de vérifier les pilotes de périphériques dans Microsoft Windows, utilisez le Gestionnaire de périphériques situé dans le Panneau de configuration.
Vérifier la version actuelle du pilote CLI
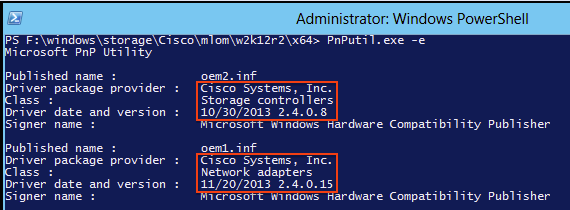
Pour Windows, Server Core et l'utilitaire Plug-and-Play (PNPUtil.exe) sont utilisés pour vérifier les versions des pilotes.
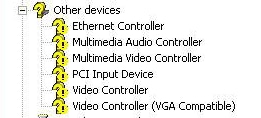
Pilotes manquants
Les périphériques matériels dont les pilotes sont manquants sont affichés dans le Gestionnaire de périphériques avec un point d'interrogation jaune. Ces périphériques doivent être mis à jour avec le pilote approprié afin d'éviter tout comportement inattendu.
Installation du pilote
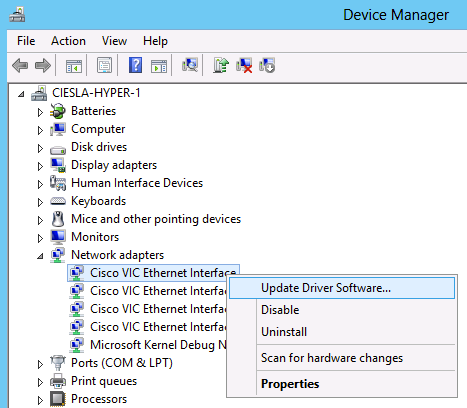
Afin d'installer ou de mettre à jour un pilote dans Microsoft Windows, cliquez avec le bouton droit sur le périphérique, et choisissez Install/Update Driver afin de démarrer l'Assistant d'installation.
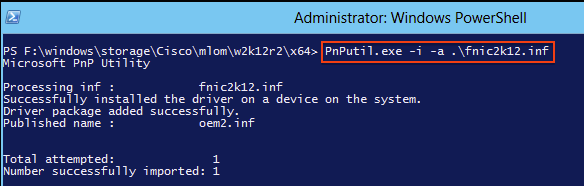
Installation du pilote à partir de la CLI
L'outil PNPUtil peut également être utilisé pour installer des pilotes à partir de l'interface de ligne de commande. Le bundle ISO du pilote peut être monté via la console UCS KVM Virtual Media.
Commandes CLI Windows utiles
| Commande |
Description |
| pnputil.exe -e |
Répertoriez tous les pilotes tiers installés. |
| pnputil.exe -a <nom INF> |
Installez le pilote. |
| pnputil.exe -d <nom INF> |
Supprimez le pilote. |
| pnputil.exe -f -d <nom INF> |
Forcer la suppression du pilote. |
| |
|
Red Hat et SUSE Linux
Cette section décrit comment installer et valider un pilote sur Red Hat Enterprise Linux (RHEL) et SUSE Linux Enterprise Server (SLES).
Informations générales sur SUSE
À partir de SLES 12 SP1, les pilotes eNIC et usNIC Cisco sont regroupés en un seul RPM (au lieu d'être regroupés dans des RPM distincts, comme c'est le cas pour d'autres distributions Linux). Le regroupement des deux pilotes en un seul RPM est nécessaire en raison de la façon dont les dépendances des modules du noyau sont gérées dans SLES 12 SP1 et versions ultérieures. Si vous n'utilisez pas la fonctionnalité usNIC de Cisco (par exemple, si vous n'avez provisionné aucun périphérique usNIC dans UCSM / CIMC), le pilote usNIC est effectivement ignoré.
Les pilotes eNIC et usNIC possèdent leurs propres numéros de version. Si vous installez le RPM cisco-enic-usnic sur SLES 12 SP 1 ou version ultérieure, une fois que ces pilotes sont chargés dans le noyau en cours d'exécution (par exemple, via le redémarrage), utilisez cat /sys/module/enic/version et cat /sys/module/usnic_verbs/version pour afficher leurs numéros de version respectifs. Le RPM cisco-enic-usnic possède également son propre numéro de version distinct. Étant donné qu'il représente l'emballage des pilotes eNIC et usNIC, le numéro de version RPM semble similaire, mais ne reflète pas la version spécifique de l'un ou l'autre pilote.
Pour plus d'informations sur les versions exactes du pilote, consultez la section Description du RPM. La requête ressemble à l'exemple ci-dessous :
# rpm -qip cisco-enic-usnic-kmp-default-.x86_64.rpm
Name : cisco-enic-usnic-kmp-default Relocations: (not relocatable)
...
Summary : Cisco VIC Ethernet NIC drivers
Description :
This RPM contains both the Cisco VIC Linux Ethernet driver (enic.ko, version ) and
the Cisco Userspace NIC (usNIC) Linux Ethernet driver (usnic_verbs.ko, version ).
Some Linux distros require both kernel modules to be in the same RPM in order to properly test for
symbol compatibility (because usnic_verbs.ko depends on enic.ko) when installing into post-GA
upgrade kernels.
Vérifier les versions actuelles du pilote et du système d'exploitation
Voici une liste des commandes utilisées afin de vérifier la version actuelle du pilote et du système d'exploitation :
| Commande |
Description |
| modinfo nom_pilote |
Affiche la version du pilote spécifié qui est chargé (par défaut) au prochain redémarrage. |
| modinfo /path/to/driver_name.ko |
Affiche la version du pilote pour le fichier d'objet noyau du pilote spécifié. |
| cat /sys/module/enic/version |
Affiche la version du pilote Ethernet actuellement chargé dans le noyau Linux en cours d'exécution pour l'adaptateur Cisco VIC. |
| cat /sys/module/fnic/version |
Affiche la version du pilote de la carte réseau FC actuellement chargée dans le noyau Linux en cours d'exécution pour la carte Cisco VIC. |
| cat /sys/module/megaraid_sas/version |
Affiche la version du pilote LSI MegaRAID actuellement chargée dans le noyau Linux en cours d'exécution. |
| lsmod -l |
Répertorie les pilotes actuellement chargés dans le noyau. |
| cat /etc/redhat-release |
Affiche la version RHEL (pour RHEL 6.x et versions antérieures). |
| cat /etc/SuSE-release |
Affiche la version SUSE (pour SLES 11 SP3 et versions antérieures). |
| cat /etc/os-release |
Affiche la version RHEL (pour RHEL 7.x et versions ultérieures, et SLES 11 SP4 et versions ultérieures). |
| uname -a |
Affiche les informations relatives au noyau. |
Remarque : Sachez que la commande modinfo [ nom du pilote ] affiche les informations du module sur le pilote qui est chargé lors du prochain redémarrage. Il ne s'agit pas nécessairement de la même version de pilote actuellement chargée dans le noyau en cours d'exécution. Vérifiez cat/sys/module/DRIVER_NAME/version pour valider la version du pilote chargée dans le noyau en cours d'exécution et/ou utilisez la commande modinfo [ /path/to/driver.ko, printer).aspx ] pour valider les informations de module pour un fichier d'objet noyau de pilote spécifique.
Conseil : Reportez-vous au tableau de référence des noms de pilotes qui se trouve dans l'annexe pour obtenir des exemples d'autres noms de pilotes courants.
Cet exemple montre qu'une version du pilote ENIC 3.2.210.18-738.12 intégrée au package RPM cisco-enic-usnic 3.2.272.23 est installée sur SLES 15 GA.
# cat /etc/os-release
NAME="SLES"
VERSION="15"
VERSION_ID="15"
PRETTY_NAME="SUSE Linux Enterprise Server 15"
ID="sles"
ID_LIKE="suse"
ANSI_COLOR="0;32"
CPE_NAME="cpe:/o:suse:sles:15"
# rpm -qa | grep enic
cisco-enic-usnic-kmp-default-3.2.272.23_k4.12.14_23-738.12.x86_64
# modinfo enic | grep ^version
version: 3.2.210.18-738.12
# cat /sys/module/enic/version
3.2.210.18-738.12
Installation du pilote
Les pilotes dans RHEL et SLES sont installés à l'aide du Gestionnaire de package Redhat (RPM). Utilisez cette commande afin d'installer le pilote :
# rpm -ihv RPM_filename.x86_64.rpm

Conseil : Lorsque vous installez des pilotes sous Linux, vérifiez que les fichiers README associés au pilote sont disponibles. Vous pouvez consulter le contenu du RPM pour voir où son fichier README associé a été installé ( rpm -qp kmod-enic). Certains packages de pilotes RPM dépendent d'autres modules et nécessitent l'installation de packages RPM supplémentaires. Les fichiers LISEZMOI contiennent des instructions complètes sur l'installation du fichier de pilote.
Annexe
Tableau de référence des noms de pilote
Ce tableau indique les noms ou préfixes des pilotes courants.
| Commande |
Description |
| grec |
Carte réseau Ethernet Cisco VIC |
| fanique |
Carte réseau Cisco VIC FC |
| qle ou qla |
Adaptateur Qlogic |
| lpfc |
Adaptateur de bus hôte Emulex (impulsion lumineuse) |
| be2net |
Carte réseau Ethernet Emulex |
| igb ou ixgbe |
Cartes réseau Intel |
| bnx |
adaptateur Broadcom |
| mégaraid |
LSI MegaRAID |
| mégastre |
RAID logiciel intégré |
| niénique |
Carte réseau Ethernet Cisco VIC pour ESXi 6.5 |
Informations connexes
 Commentaires
Commentaires