Comprender las prácticas recomendadas AP Auto-Locate in Spaces AnyLocate
Contenido
Introducción
Este documento describe las prácticas recomendadas y la solución de problemas para la localización automática de AP en Cisco Spaces AnyLocate.
Overview
Cisco Spaces AnyLocate (localización automática de puntos de acceso) utiliza medición FTM, datos de GNSS (GPS) y posicionamiento relativo de punto de acceso a punto de acceso para determinar la ubicación de los puntos de acceso en los mapas de planta.
Este documento proporciona los requisitos de configuración, las prácticas recomendadas, los pasos de validación y la guía de resolución de problemas para ayudar a garantizar una ubicación precisa del AP y una medición exitosa.
Prerequisites
Requirements
Cisco recomienda que tenga conocimiento sobre estos temas:
Validación del controlador de LAN inalámbrica (WLC)
Estas configuraciones son obligatorias para que la localización automática de AP funcione correctamente.
FTM y geolocalización
El rango de FTM y la geolocalización de AP se deben habilitar en el controlador.
Consulte la documentación de Cisco:
-
Derivación de geolocalización
Estas funciones permiten realizar mediciones de distancia de AP a AP y posicionamiento basado en GPS.
Suscripciones TDL (telemetría)
Las suscripciones TDL entre espacios y WLC deben estar activas. Este es el canal a través del cual se transmiten los datos de medición.
- El número de suscripción TDL lleva el prefijo de los primeros 7 dígitos de la ID del conector, con el sufijo [11-21].
- Suscripciones TDL requeridas, funciones y respectivas versiones mínimas de código WLC requeridas:
| subscription-id |
tdl-uri |
min-version-required |
| 11 |
/services;serviceName=ewlc_oper/rrmAPautoRfdot11Data |
Siempre presente |
| 14 |
/services;serviceName=wncloudm_oper/ap_gnss_loc_data |
>=17.12.0 |
| 12 |
/services;serviceName=ewlc_oper/ap_sensor_cache |
>=17.12.0 |
| 13 |
/services;serviceName=ewlc_oper/ap_range_data |
>=17.12.0 |
| 17 |
/services;serviceName=ewlcevent/geo_loc_asc_meas |
>=17.12.2 |
| 18 |
/services;serviceName=ewlc_oper/cdp_cache_data |
>=17.12.0 |
| 20 |
/services;serviceName=ewlcevent/geoloc_disruptive_range |
>=17.13.0 |
| 21 |
/services;serviceName=ewlcevent/ap_move |
>=17.13.0 |
| 22 |
/services;serviceName=ewlcevent/todoa_events |
>=17.18.2 |
Comandos de validación
- Mostrar suscripciones activas
show telemetry ietf subscription all- Mostrar detalles de suscripción
show telemetry ietf subscription <subscription-id> receiver- Quitar suscripción
(config)# no telemetry ietf subscription Componentes Utilizados
La información que contiene este documento se basa en las siguientes versiones de software y hardware.
- Spaces Connector 3 - Location Service 3.1.0.94 o posterior
- Catalyst 9800 - Versión mínima 17.12.1 (17.15 para AP 917x)
- Modelos de puntos de acceso compatibles: 9130, 9136, 9164, 9166
- Archivo CAD de mapa de planta - formato DWG (publicado en espacios)
- Debe activarse la velocidad de 6 GHz para obtener una precisión de alcance (WLAN activada para 6 GHz).
- AnyLocate no es compatible con la etiqueta de sitio predeterminada de Catalyst (debe colocar los AP en la nueva etiqueta de sitio).
- Utilizar la interfaz de usuario beta (editar en el panel principal de Spaces).
Cargar un archivo CAD completo en Espacios en ubicaciones y mapas (sección Mapas enriquecidos). Debe estar vinculado a un elemento de jerarquía de ubicación que se puede crear a partir del método CSV. El proceso de generación de mapas dinámicos puede durar de 3 días a 2 semanas. CAD se puede rechazar en función de los criterios y requisitos de la capa.
La información que contiene este documento se creó a partir de los dispositivos en un ambiente de laboratorio específico. Todos los dispositivos que se utilizan en este documento se pusieron en funcionamiento con una configuración verificada (predeterminada). Si tiene una red en vivo, asegúrese de entender el posible impacto de cualquier comando.
Requisito NETCONF
AnyLocate utiliza NETCONF/SSH para sondear la lista de AP desde el controlador.
NETCONF debe estar habilitado y las credenciales actuales deben actualizarse en la interfaz de usuario de Spaces. Si la lista de AP no se sondea correctamente en 30 días, los datos de rango de AP se purgan de Spaces
Validación de GPS
Para validar la funcionalidad de GNSS:
show gnss status-
Compruebe el número de satélites que oyen los puntos de acceso.
-
Se requiere un mínimo de 4 satélites para un posicionamiento GPS fiable.
-
La validación GPS es más adecuada para la validación en la nube y la ubicación de anclajes.
Mejores medidas
Comportamiento de medición
Espere 15 minutos para que se rellenen las tablas de vecinos y los datos de rango.
Asegúrese de que al menos una WLAN esté activa en:
-
5 GHz
-
6 GHz (se recomienda para mejorar la precisión de medición)
Ámbito de medición
Para evitar problemas de rendimiento, las etiquetas de sitio se configuran por planta o por edificio:
-
Se recomienda usar menos de 250 AP a la vez a través de cualquiera de estas opciones:
-
Por etiqueta de sitio, o
-
AP seleccionados
-

Nota: El rango de demasiados AP simultáneamente puede dejar algunos AP sin datos de rango y operaciones incompletas.
Consideraciones operativas
La medición de AP afecta el rendimiento y debe programarse durante una ventana de mantenimiento.
Se recomiendan los parámetros predeterminados de FTM.
Asegúrese de que los archivos CAD tengan una precisión dimensional y coincidan con el espacio físico.
Restricción del servicio de mapa
Si existen mapas de Catalyst Center en Cisco Spaces:
-
Los mapas de AnyLocate no se pueden publicar en el servicio de mapas.
-
El mapa de planta de CatC debe eliminarse antes de publicar los resultados de AnyLocate.
Comandos de Troubleshooting de Rangos
| Comandos WLC |
Descripción |
| show ap geolocation range capability |
Detalla la capacidad de AP para participar en la medición |
| show ap geolocation summary |
Proporciona datos gnss para todos los puntos de acceso |
| show ap geolocation gnss-capability summary |
Muestra si los AP son compatibles con GPS o no. |
| show ap geolocation range request |
AP a los que se envía la solicitud de ping y AP de los que se reciben los informes |
| show ap geolocation range report |
Proporciona una lista completa de todos los últimos y mejores registros recibidos de todos los APs compatibles con FTM |
| show ap geolocation range status |
Muestra la detección de rango de AP a AP con los AP vecinos. |
| Comandos de AP |
Descripción |
| show ap name <gray-ap-name> geo range range status |
Estado de rango de AP a AP para un AP que aparece gris en el mapa de planta |
| show spaces endpoint connection detail |
Información relacionada con los GNSS en el punto de acceso (AP) |
| show spaces endpoint key authentication |
|
| show spaces endpoint key access |
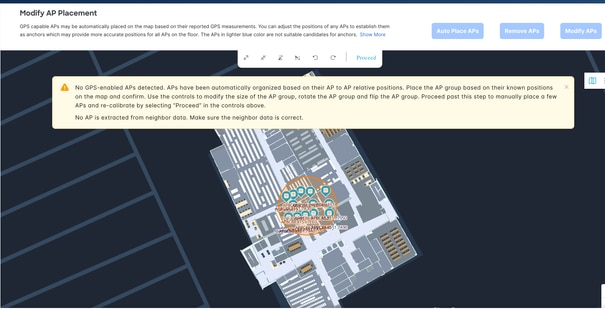
Ubicación de PA
Clave de color del punto de acceso
-
Azul sólido: anclaje posible, decidido por algoritmo (normalmente puntos de acceso de extremo)
-
Azul claro - AP de rango estándar
-
Gris: sin datos de medición
-
Verde: AP colocado manualmente por el usuario
Superposición de PA
La ubicación inicial es sin anclaje, basada en las distancias relativas de AP a AP. Por lo tanto, esta no es la posición real, solo el agrupamiento de AP con su posición relativa basada en sus distancias.
La superposición de AP podría requerir una rotación manual para alinearse con el mapa de planta. Utilice la función de rotación para girar manualmente la superposición de AP completa para ubicarse sobre los mapas enriquecidos
Es posible que la posición inicial no esté alineada con la orientación del mapa, pero sea precisa en relación con la ubicación del AP.
Requisito de AP de anclaje
Asegúrese de que la red tenga un mínimo de 4-5 AP de anclaje cuyas ubicaciones se puedan determinar a través del GPS o de una ubicación manual basada en posiciones relativas conocidas.
Estos AP de anclaje se utilizan como puntos de referencia para calcular las posiciones relativas de los AP restantes en la red.
Consideraciones sobre GPS
La disponibilidad del GPS depende de:
-
Modelo de AP
-
Ubicación física
-
Cerca de las ventanas
-
Los AP del primer piso a menudo tienen mala calidad de la señal GPS.
Aislamiento y línea de visión
La línea de visión es extremadamente importante para la medición. Si un AP está aislado o no tiene ninguna trayectoria para ser oído por otros AP (por lo menos 3), no genera datos de medición.
Asegúrese de que el punto de acceso esté montado cerca de una ventana o que tenga una línea de visión clara hacia el cielo para permitir que el módulo GPS obtenga la señal del satélite:
- Se vincula con los AP vecinos.
- Cuando no está clasificado, el usuario necesita colocar AP manualmente. (Se muestra como AP gris).
Precisión
La precisión depende en gran medida de los factores de aislamiento y de visibilidad mencionados anteriormente. Es posible que se requiera una revisión del espacio físico para confirmar si los AP están posicionados para un rango adecuado.
Se recomienda encarecidamente realizar alguna intervención manual en la colocación del punto de acceso después de la colocación del sistema para garantizar el mayor grado de colocación del punto de acceso
La ubicación de AP tiene efectos descendentes en el seguimiento de ubicación y activos debido a los requisitos RTLS del punto de referencia de ubicación de AP.
Eliminación de una imagen de mapa de planta central de Catalyst en Cisco Spaces
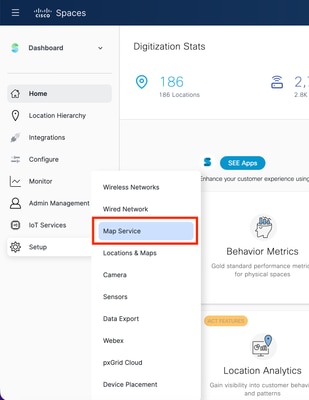
- Inicie sesión en el panel de Cisco Spaces.
- Vaya a Setup > Map Service.
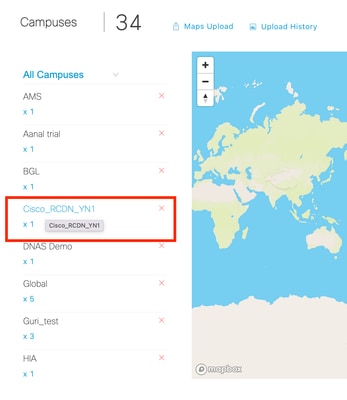
- Profundizar en la jerarquía de ubicaciones:
- Campus > Edificio > Planta
Campus:
Edificio:
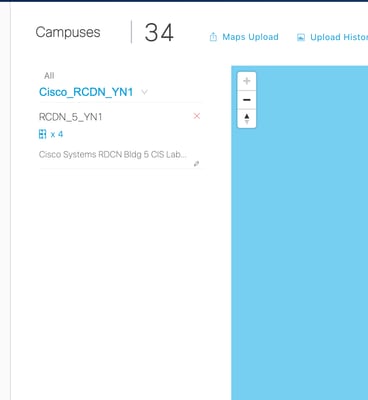
Piso:
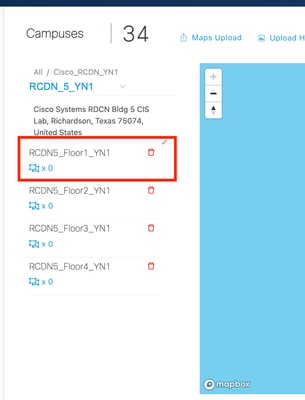
1. Seleccione el suelo que desea eliminar.
2. Haga clic en el icono Eliminar (papelera) junto a la planta.
3. Cuando se le pregunte ¿Está seguro de que desea eliminar la planta?, haga clic en Sí para confirmar.
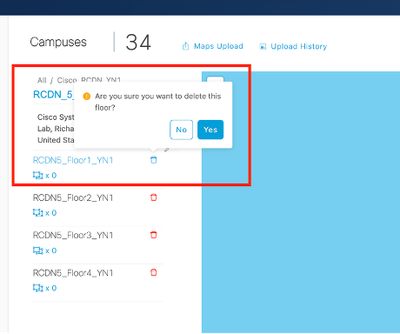
Una vez confirmada, la imagen del mapa de planta se elimina de Cisco Spaces.
Historial de revisiones
| Revisión | Fecha de publicación | Comentarios |
|---|---|---|
1.0 |
07-May-2026
|
Versión inicial |
 Comentarios
ComentariosContacte a Cisco
- Abrir un caso de soporte

- (Requiere un Cisco Service Contract)