Verständnis von konnektiven und Channelized SONET-Schnittstellen auf Cisco Routern
Inhalt
Einführung
SONET ist eine Spezifikation des American National Institute Standard (ANSI). SONET verwendet STS-Framing (Synchronous Transport Signal), das auf den Spezifikationen des T-Carriers basiert. Der Standard Telcordia (Bellcore) Publication GR-253 definiert außerdem SONET-Raten und -Formate und beinhaltet die Verkettung in Abschnitt 3.2.3.
Die Synchronous Digital Hierarchy (SDH) wurde zu einem späteren Zeitpunkt eingeführt, als die internationale Gemeinschaft diese neue Standardisierung zur Kenntnis nahm. SDH wird durch den ITU-Telecommunications (ITU-T) Standardisierungssektor (ehemals CCITT) gesteuert und nutzt das Synchronous Transport Mode (STM)-Framing und basiert die Struktur auf E-Carrier oder der CEPT-Umgebung. Die ITU-T- und CCITT-Empfehlungen definieren Raten und Formate unter G.708 und G.709.
Dies entspricht dem IEEE 802.3-Standard, der die Grundlage des Ethernet-Standards bildet. Zwischen den beiden Formaten funktioniert alles gleich. Diese beiden Bildformate werden als eine grundlegende Rahmenstruktur auf STS-3- und STM-1-Ebene zusammengestellt und werden in SONET-Begriffen in diesem Dokument behandelt. Obwohl SDH eine andere Reihe von Akronymen verwendet, betrachten Sie SDH als die internationale Version von SONET für die Zwecke dieses Dokuments.
Voraussetzungen
Anforderungen
Für dieses Dokument bestehen keine speziellen Anforderungen.
Verwendete Komponenten
Dieses Dokument ist nicht auf bestimmte Software- und Hardwareversionen beschränkt.
Konventionen
Weitere Informationen zu Dokumentkonventionen finden Sie unter Cisco Technical Tips Conventions (Technische Tipps zu Konventionen von Cisco).
Übersicht über SONET/SDH-Framing
Ein SONET-Frame besteht aus mehreren STS-Streams mit niedrigerer Geschwindigkeit, die byte-interleaved in den Frame sind. So wird beispielsweise ein STS-3-Frame erstellt:
-
1., 4., 7. usw., bis zur 268. Spalte des Frames werden vom ersten STS-1 abgeleitet.
-
2., 5., 8. usw., bis zur 269. Spalte des STS-3-Frames wird vom zweiten STS-1 abgeleitet.
-
3., 6., 9. usw., bis zur 270. Spalte des STS-3-Frames wird vom dritten STS-1 abgeleitet.
Es folgt eine Abbildung, wie die TOH-Spalten (Transport Overhead) der Byte-Streams des STS-1-Composite nach Byteverschachtelung am Anfang des STS-3-Frames ausgerichtet werden:
Dieses Dokument bezieht sich auf drei Arten von Gemeinkosten für SONET. Es gibt auch eine vierte, die TOH, die verwendet wird, um zwei dieser Gemeinkosten zu umfassen. Dies sind die Linien-Overhead (LOH) und Abschnitt-Overhead (SOH). Sie werden etwas anders als in IP behandelt und enthalten das Protokoll, das für die Kommunikation benachbarter SONET-Geräte verwendet wird. Diese Informationen können geändert werden, wenn sie vom SONET-Gerät an das nächste SONET-Gerät übertragen werden.
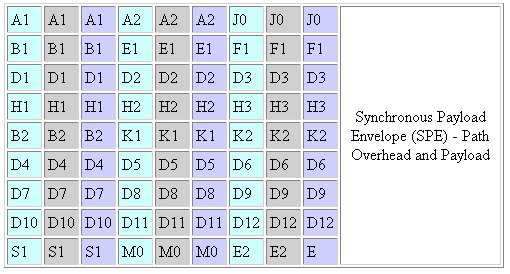
Der Pfad-Overhead (POH) ermöglicht die Kommunikation derselben Art von dem Punkt, von dem die Leitung ausgeht, bis zu dem Punkt, an dem die Leitung unverändert endet, da die Leitung alle SONET-Geräte durchquert. Dieser Pfad-Overhead wird mit den Daten gekoppelt und als Synchronous Payload Envelope (SPE) bezeichnet.
Verkettete (nicht kanalisierte) SONET-Frames
Die Struktur von SONET wurde zunächst mit einer kanalisierten Struktur entwickelt. 28 VTs bildeten ein STS-1. Drei STS-1s bildeten ein STS-3 usw. Jedes Byte innerhalb des STS-Frames hat eine direkte Beziehung zu einem Basis-VT, um die Erstellung des STS zu unterstützen. Da der Bedarf an Bandbreite größer als die Basisbandbreite von aVT-1 ist, wurde eine neue Anforderung entwickelt, um diese Channelization zu entfernen.
Ein niedrigeres "c" in der STS-Rate steht für "verkettet" und gibt an, dass die Schnittstellenhardware nicht kanalisiert ist. Beispiele für verkettete Schnittstellen sind STS-3c und STS-12c. Die meisten SONET-Schnittstellen auf Cisco Routern sind miteinander verknüpft.
Wie Sie sehen können, enthält ein kanalisiertes STS-3 drei einzelne STS-1-Schaltkreise, von denen jede über eine eigene SPE mit POH verfügt, sowie Daten, die innerhalb des STS-1-Schaltkreises übertragen werden. Ein STS-3c enthält nur einen einzigen synchronen Payload-Umschlag und eine einzelne Spalte POH, die immer am Ort des normalerweise ersten STS-1 angezeigt wird. Sie können sich STS-3c als drei STS-1-Frames vorstellen, die zusammengeklebt wurden, um einen einzigen, größeren Frame zu erstellen. SONET-Geräte behandeln diese Schnittstellen als eine Einheit.
Hier sehen Sie eine Abbildung der Overhead-Bytes, die mit einem verknüpften SONET-Frame verwendet werden.
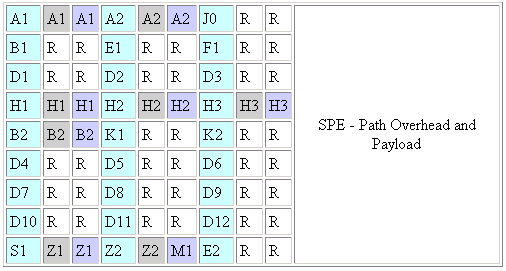
Viele SONET-Overhead-Funktionen können einmal für den gesamten Frame ausgeführt werden. In diesem Diagramm eines verketteten Frames gibt R eine nicht verwendete Byteposition an. Diese ungenutzten Bytes können nicht für die Nutzlast verwendet werden und werden einfach ignoriert Platzhalter. So sind beispielsweise die Bitparitätsprüfung durch das B1-Byte im Schnittstellenoverhead- und APS-Status (Automatic Protection Switching) sowie die Ereignisberichte über die K1- und K2 APS-Bytes in den Leitungsoberflächen nicht definiert und ignoriert, außer im ersten STS-1 des STS-3.
Channelized SONET-Frames
Wie verkettete Schnittstellen ist eine Channelized SONET-Schnittstelle eine Kombination aus STS-Streams mit geringerer Geschwindigkeit. Eine Channelized SONET-Schnittstelle verwaltet die Streams jedoch als unabhängige Frames mit eindeutigen Payload-Zeigern. Die Frames werden vor der Übertragung einfach Multiplexing durchgeführt, um die Übertragungskapazität der physischen Glasfaser zu erhöhen. Dieser Prozess ähnelt dem Multiplexing von 24 Kanälen mit digitalem Signalpegel 0 (DS0s) in einem DS1- oder Multiplexing von 28 DS1-Streams in einer DS3.
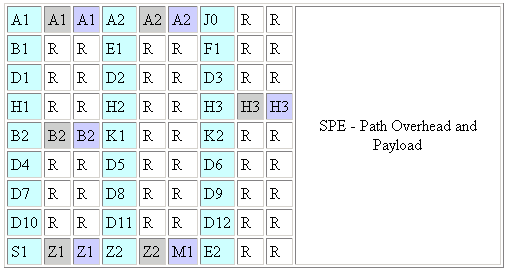
Die folgende Abbildung zeigt die Bytepositionen im Transport-Overhead, die mit Channelized SONET Frames verwendet werden. R gibt eine nicht verwendete Byteposition an.
H1- und H2-Byte als Anhaltsindikatoren
Der GR-253-Standard für SONET-Netzwerke legt fest, dass die H1- und H2-Byte im Leitungsoberflächenteil verwendet werden, um anzugeben, ob die Frames kanalisiert werden oder nicht.
Bei einem verketteten Schaltkreis wie dem STS-3c-Beispiel verwenden verkettete Schnittstellen der Spalten 2 und 5 sowie der Spalten 3 und 6 Werte von 1001XX11 für H1-Byte und 1111111 für H2-Byte. GR-253 gibt an, dass nur der erste kombinierte STS-Stream diese H1- und H2-Werte wirklich verwendet. Alle anderen Streams müssen die Bits 7-16 auf 1 einstellen und das neue Datenflag Bit 1-4 auf 1001 festlegen.
Kanalisierte Schnittstellen verwenden diese H1- und H2-Byte, um einen Zehn-Bit-Zeiger zu bilden, der den Bytespeicherort angibt, an dem ein neuer Frame der SPE für jeden zugehörigen STS-1 beginnt. Der Zeiger unterstützt Werte zwischen 0 und 782. Ein STS-1 enthält 87 Spalten der SPE. Dieser Wert wird mit den neun Zeilen des Frames multipliziert, die dem Frame 783 Byte geben. SONET nummeriert diese Bytes, beginnend mit 0.
Ein STS-3- oder STS-3c-Modul umfasst das Dreifache der STS-1- bzw. 3 x 87 = 261-Spalten. Diese Zahl wird dann mit den neun Zeilen innerhalb des Rahmens multipliziert, was uns 2349 Byte ergibt. Das H1/H2-Zeigerfeld ist jedoch nur zehn Bit und gibt uns ein Maximum von 0 bis 1023 an, um einen Startort zu bestimmen, an dem die SPE beginnt. Um dieses Problem zu beheben, verdreifacht der Empfang von SONET-Schnittstellen den Wert im Zeigerfeld des ersten STS-Streams, wenn der Wert im Bereich von 0 und 782 liegt. Daher wird ein Zeigerwert von 1 als 3 und ein Zeigerwert von 782 als 2346 erkannt. Durch diese Pufferung von bis zu drei Byte wird das Problem behoben.
Kanalisierte SONET-Hardware
Cisco bietet folgende Channelized SONET-Hardware:
Hinweis: Nicht kanalisierte oder verkettete Hardware kann nicht über einen Konfigurationsbefehl für die Channelized-Steuerung bereitgestellt werden. Sie ist in der Unterstützung fest festgelegt. Darüber hinaus ist kein Befehl verfügbar, um Inkongruenzen zu erkennen oder den Framing-Typ eingehender Signale anzugeben. Verwenden Sie SONET-Testgeräte, um eine Diskrepanz zu erkennen.
Zugehörige Informationen
 Feedback
FeedbackCisco kontaktieren
- Eine Supportanfrage öffnen

- (Erfordert einen Cisco Servicevertrag)