Definir Configurações de Classe de Serviço (CoS) em um Roteador da Série RV
Objetivo
A Classe de Serviço (CoS - Class of Service) é a classificação do tráfego específico manipulando os bits da classe de serviço no cabeçalho do quadro. Isso "marca" o tráfego para que a Qualidade de Serviço (QoS) possa usar a classificação para manipular o tráfego de acordo com sua política. O CoS é usado para atribuir níveis de prioridade aos cabeçalhos dos quadros Ethernet do tráfego de rede e só se aplica a links de tronco.
Ao diferenciar o tráfego, o CoS permite que os pacotes de dados preferidos sejam rastreados e priorizados para transmissão caso a rede tenha problemas como congestionamento ou atraso. Por exemplo, você pode priorizar o tráfego de voz sobre o e-mail na rede, já que o tráfego de voz exige maior largura de banda do que o e-mail. Isso fornece o tráfego de voz com o melhor esforço do que o tráfego de e-mail, geralmente resultando em chamadas mais claras, mas em algum atraso no recebimento de e-mails.
Este artigo tem como objetivo mostrar como configurar o CoS em um roteador da série RV.
Dispositivos aplicáveis
- Série RV — RV130, RV130W, RV132W, RV134W
Versão de software
- 1.0.3.16 — RV130, RV130W
- 1.0.0.17 — RV132W
- 1.0.0.24 — RV134W
Configurações de CoS
Etapa 1. Inicie a sessão no utilitário baseado na Web e escolha QoS > Configurações de CoS.
Note: As imagens neste artigo foram tiradas do RV134W. As opções podem variar de acordo com o modelo do dispositivo.
Etapa 2. Na Tabela de configuração de CoS, escolha um valor de prioridade na lista suspensa Fila de encaminhamento de tráfego. Esses números marcam os tipos de tráfego com prioridade mais alta ou mais baixa, dependendo do tipo de tráfego. O número mais baixo corresponde a níveis de prioridade mais baixos.
Importante: Para garantir que as alterações futuras tenham efeito, o modo Confiança deve ser definido como modo CoS para a porta à qual você deseja aplicar as configurações de CoS. Se você não tiver definido a porta para o modo CoS, clique na página QoS Port-based Settings. Para obter mais informações, clique aqui.
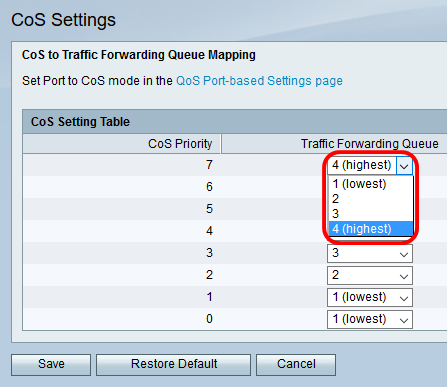
Note: Neste exemplo, 4 (mais alto) é escolhido.
Etapa 3. Clique em Salvar para salvar suas alterações.
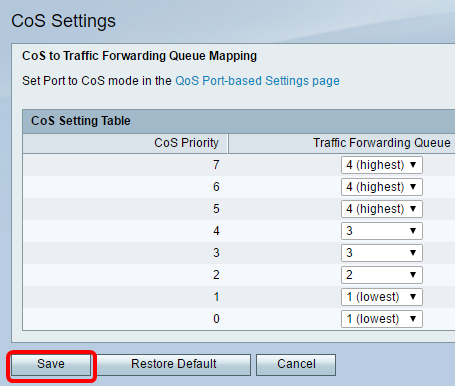
Agora você deve ter definido as configurações de CoS em seu roteador da série RV.
Histórico de revisões
| Revisão | Data de publicação | Comentários |
|---|---|---|
1.0 |
13-Dec-2018
|
Versão inicial |
 Feedback
Feedback