Understanding Concatenated and Channelized SONET Interfaces on Cisco Routers
Available Languages
Contents
Introduction
SONET is an American National Institute Standard (ANSI) specification. SONET uses synchronous transport signal (STS) framing, which is based on T-carrier specifications. The Telcordia (Bellcore) Publication GR-253 standard also defines SONET rates and formats, and includes concatenation in section 3.2.3.
Synchronous Digital Hierarchy (SDH) was introduced at a later point, when the international community took notice of this new standardization. Controlled by the ITU-Telecommunications (ITU-T) Standardization Sector, formerly CCITT, SDH uses Synchronous Transport Mode (STM) framing, and bases the structure on E-carrier or the CEPT environment. The ITU-T and CCITT recommendations define rates and formats under G.708 and G.709.
This is just like IEEE 802.3 standard, which is the basis of the Ethernet standard. Everything works the same way between the two formats. These two framing formats come together as one basic framing structure at the STS-3 and STM-1 level and are referred to in SONET terms in this document. Even though SDH uses a different set of acronyms, consider SDH as the international version of SONET for the purposes of this document.
Prerequisites
Requirements
There are no specific requirements for this document.
Components Used
This document is not restricted to specific software and hardware versions.
Conventions
Refer to Cisco Technical Tips Conventions for more information on document conventions.
Overview of SONET/SDH Framing
A SONET frame consists of multiple lower-speed STS streams, which are byte-interleaved into the frame. For example, here is how an STS-3 frame is built:
-
1st, 4th, 7th, and so on, up to the 268th column of the frame are derived from the first STS-1.
-
2nd, 5th, 8th, and so on, up to the 269th column of the STS-3 frame are derived from the second STS-1.
-
3rd, 6th, 9th, and so on, up to the 270th column of the STS-3 frame are derived from the third STS-1.
Here is an illustration of how the transport overhead (TOH) columns of the composite STS-1's byte streams are aligned at the start of the STS-3 frame after byte-interleaving:
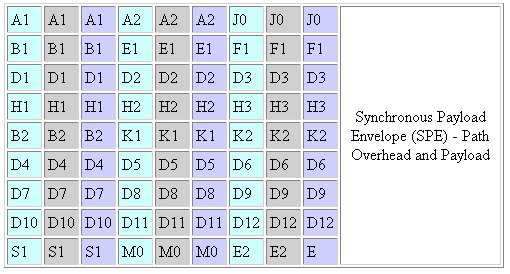
This document refers to three types of overheads for SONET. There is also a fourth, the TOH, which is used to encompass two of these overheads. These two are the line overhead (LOH) and section overhead (SOH). Handled somewhat differently than in IP, they contain the protocol used for adjacent SONET devices to communicate with each other. This information can be changed as it passes from SONET device to the next SONET device.
The path overhead (POH) provides communications of the same nature from the point the circuit originates to the point the circuit terminates without change as the circuit passes through all SONET devices along the way. This path overhead is coupled with the data, and is referred to as Synchronous Payload Envelope (SPE).
Concatenated (Unchannelized) SONET Frames
The structure of SONET was first developed with a channelized structure. Twenty-eight VTs made up one STS-1. Three STS-1s made up an STS-3 and so on. Any one byte within the STS frame has a direct relationship to a base VT to help make up the STS. As the need for bandwidth grew past the base bandwidth of aVT-1, a new requirement was developed to remove this channelization.
A lower-case "c" in the STS rate stands for "concatenated", and indicates that the interface hardware is not channelized. Examples of concatenated interfaces include STS-3c and STS-12c. Most SONET interfaces on Cisco routers are concatenated.
As you can see, a channelized STS-3 contains three individual STS-1 circuits, each with its own SPE that contains POH, and data that is transported within the STS-1 circuit. An STS-3c contains a only single synchronous payload envelope and a single column of POH, which always appears in the location of what would normally be the first STS-1. You can think of an STS-3c as three STS-1 frames pasted together to create a single, larger frame. SONET equipment treats these interfaces as a single entity.
Here is an illustration of overhead bytes used with a concatenated SONET frame.
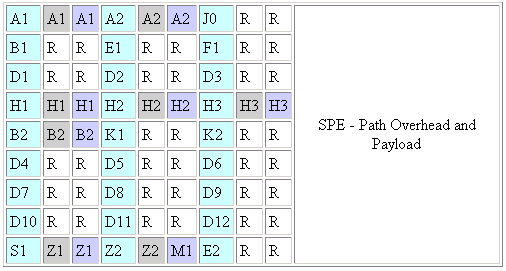
Many SONET overhead functions can be performed once for the full frame. In this diagram of a concatenated frame, R indicates an unused byte position. These unused bytes cannot be used for payload, and are simply ignored place holders. For example, the bit interleaved parity check through the B1 byte in the section overhead and Automatic Protection Switching (APS) status, and event reporting through the K1 and K2 APS bytes in the line overhead are undefined and ignored, except in the first STS-1 of the STS-3.
Channelized SONET Frames
Like concatenated interfaces, a channelized SONET interface is a composite of lower-speed STS streams. However, a channelized SONET interface maintains the streams as independent frames with unique payload pointers. The frames are simply multiplexed before transmission to increase the carrying capacity of the physical fiber. This process is similar to multiplexing 24 digital signal level 0 (DS0s) channels into a DS1 or multiplexing 28 DS1 streams into a DS3.
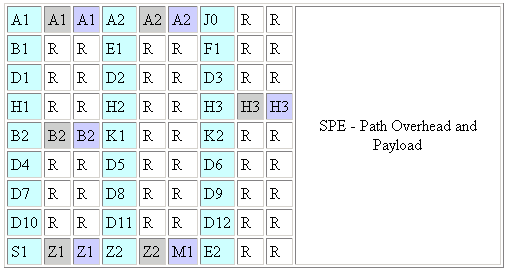
Here is an illustration that indicates the byte positions in the transport overhead that are used with channelized SONET frames. R indicates an unused byte position.
H1 and H2 Bytes as Concantenation Indicators
The GR-253 standard for SONET networks specifies use of the H1 and H2 bytes in the line overhead section to indicate whether or not the frames are channelized.
With a concatenated circuit such as the STS-3c example, concatenated interfaces of columns 2 and 5 and columns 3 and 6 use values of 1001XX11 for the H1 bytes and 11111111 with H2 bytes. GR-253 specifies that only the first composite STS stream truly uses these H1 and H2 values. All other streams must set bits 7-16 to 1, and set the new data flag bit 1-4 to 1001.
Channelized interfaces use these H1 and H2 bytes to form a ten-bit pointer, which indicates the byte location where a new frame of the SPE begins for each corresponding STS-1. The pointer supports values between 0 and 782. An STS-1 includes 87 columns of SPE. This is multiplied by the nine rows of the frame that gives the frame 783 bytes. SONET then numbers these bytes starting with 0.
An STS-3 or STS-3c includes three times the STS-1, or 3 x 87 = 261 columns. This number then is multiplied by the nine rows within the frame, which gives us 2349 bytes. However, the H1/H2 pointer field is only ten bits, and gives us a maximum of 0 to 1023 to identify a starting location of where the SPE will begin. In order to resolve this problem, receiving SONET interfaces triple the value in the pointer field of the first STS stream when the value falls within the range of 0 and 782. Thus, it sees a pointer value of 1 as 3, and a pointer value of 782 as 2346. This, along with buffering up to three bytes resolves the issue.
Channelized SONET Hardware
Cisco offers these channelized SONET hardware:
Note: Unchannelized or concatenated hardware cannot be made to be channelized through a configuration command, and is fixed in its support. In addition, no command is available to detect mismatches or to indicate the framing type of incoming signals. Use SONET test equipment to detect a mismatch.
Related Information
 Feedback
FeedbackContact Cisco
- Open a Support Case

- (Requires a Cisco Service Contract)